
注塑机合模机构及其合模力平衡调节方法.pdf

纪阳****公主


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

注塑机合模机构及其合模力平衡调节方法.pdf
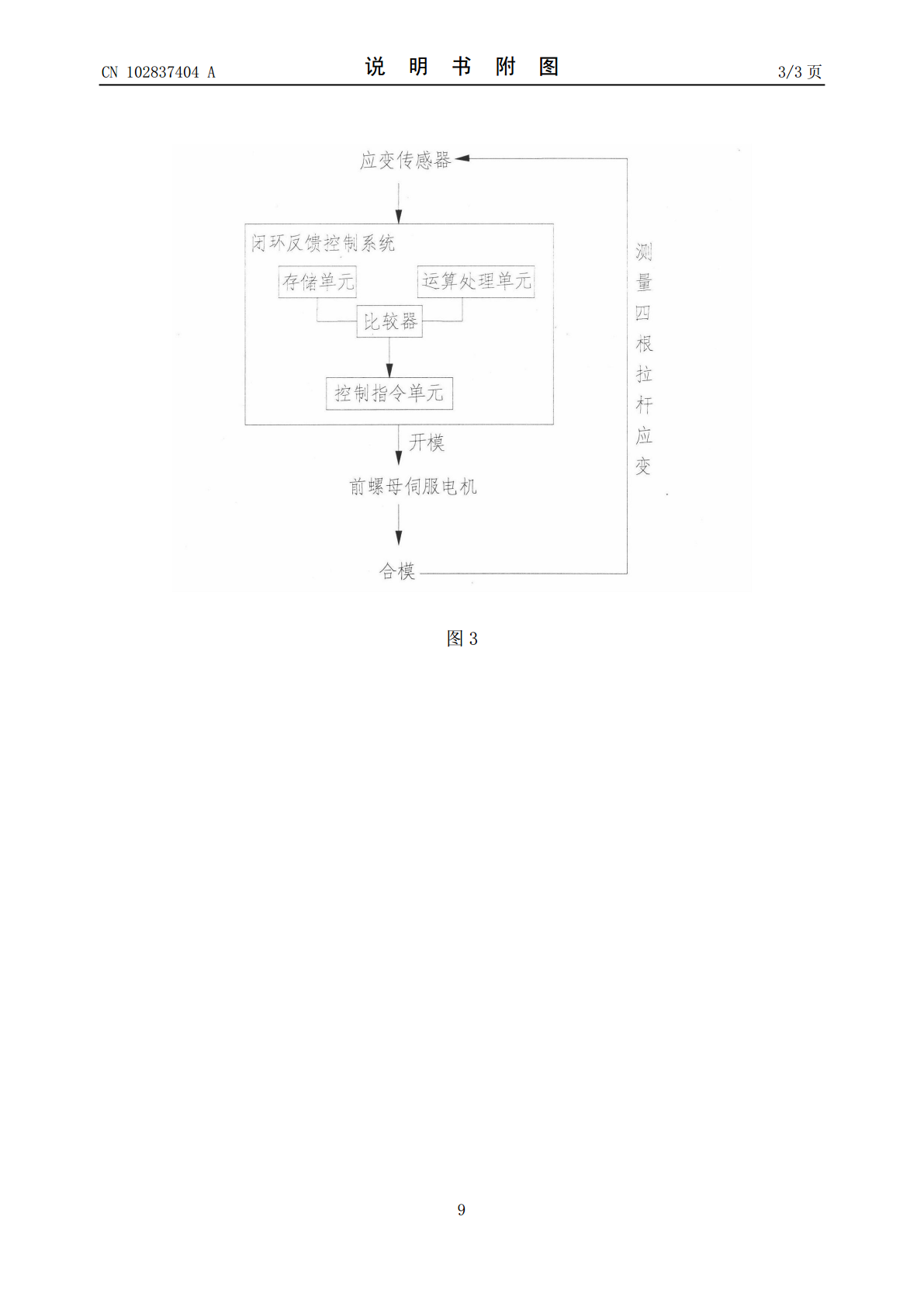
本发明公开了一种注塑机合模机构及其合模力平衡调节方法,包括后模板(1)、动模板(2)、前模板(3)、肘杆机构(4)和四根拉杆(5),所述的合模机构还包括拉杆调节机构,所述的拉杆调节机构包括均与四根拉杆(5)一一对应的应变片(6)、伺服电机(7)和前螺母(8),所述的应变片(6)在四根拉杆(5)上的位置和方向一致,所述的前螺母(8)的外周面为齿轮状,所述的伺服电机(7)上连接有驱动齿轮(9),所述的驱动齿轮(9)与前螺母(8)的外周面相啮合;并经过闭环反馈控制的平衡调节方法,实现四根拉杆的受力均匀,从而起到
一种注塑机用合模装置及其合模方法.pdf
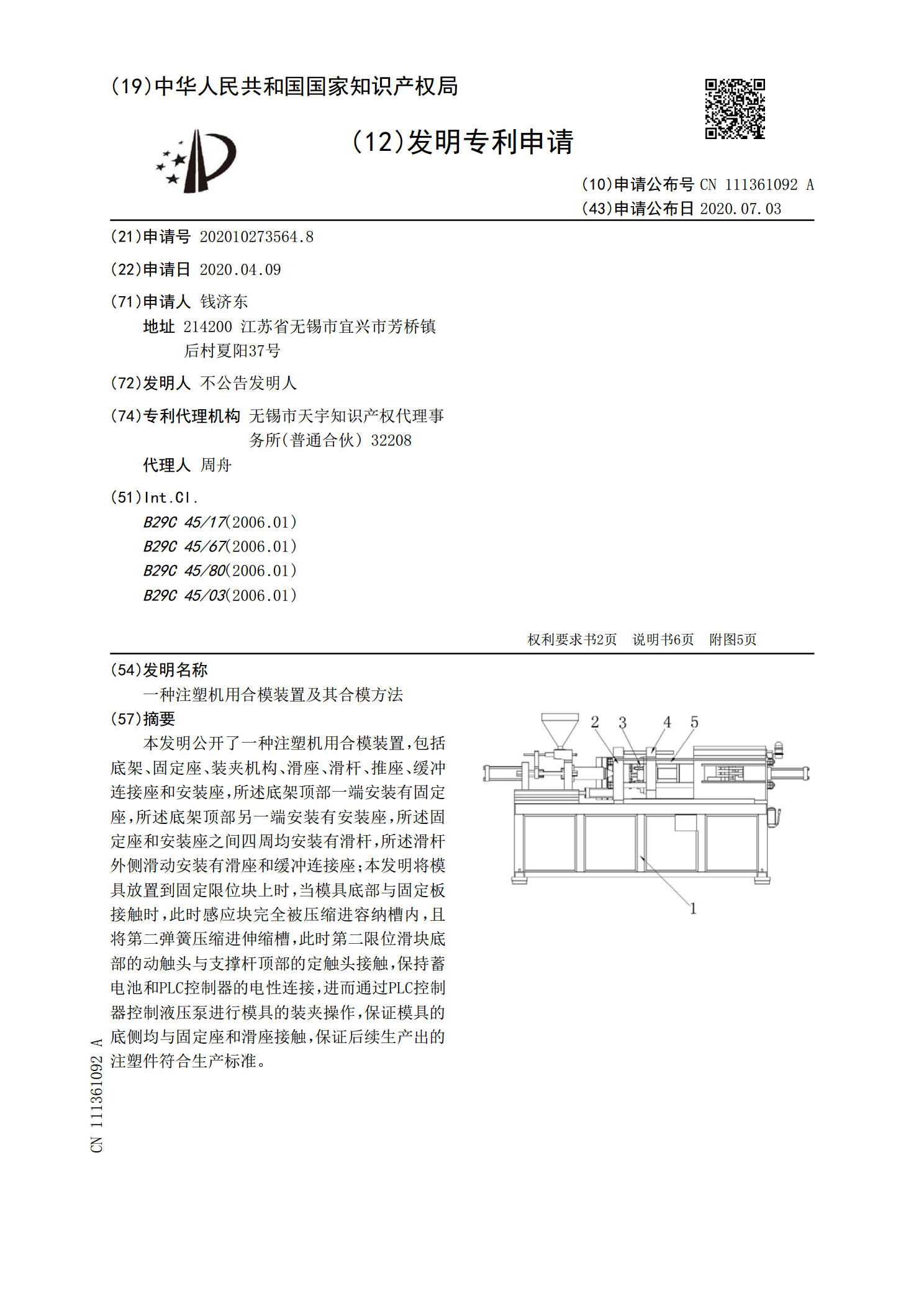
本发明公开了一种注塑机用合模装置,包括底架、固定座、装夹机构、滑座、滑杆、推座、缓冲连接座和安装座,所述底架顶部一端安装有固定座,所述底架顶部另一端安装有安装座,所述固定座和安装座之间四周均安装有滑杆,所述滑杆外侧滑动安装有滑座和缓冲连接座;本发明将模具放置到固定限位块上时,当模具底部与固定板接触时,此时感应块完全被压缩进容纳槽内,且将第二弹簧压缩进伸缩槽,此时第二限位滑块底部的动触头与支撑杆顶部的定触头接触,保持蓄电池和PLC控制器的电性连接,进而通过PLC控制器控制液压泵进行模具的装夹操作,保证模具的

注塑机合模机构运动分析.docx
注塑机合模机构运动分析注塑机是一种重要的工业设备,用于生产各种类型的塑料产品。注塑机合模机构是该设备的核心组成部分,负责控制模具的开合和产品的注入工作。本文将从运动学和动力学两个方面,对注塑机合模机构的运动进行分析。一、运动学分析注塑机合模机构的运动学分析主要研究其运动规律和运动轨迹。在分析前需要了解注塑机的基本结构。注塑机主要由四部分组成:注射系统、塑料化系统、闭模系统和液压系统。合模机构主要由模板、合模机构、模具等组成,其中模板主要分为动模板和固定模板。注塑机工作时,通过液压系统驱动动模板和固定模板的

注塑机合模力测试的新方法.docx
注塑机合模力测试的新方法Title:ANewApproachforTestingClampingForceinInjectionMoldingMachinesAbstract:Theclampingforceisacriticalparameterininjectionmoldingmachinesasitdeterminesthequalityandconsistencyofthefinalmoldedproduct.Traditionalmethodsofmeasuringclampingforceo

注塑机合模机构优化设计研究.docx
注塑机合模机构优化设计研究注塑机合模机构优化设计研究摘要:注塑机合模机构是注塑成型过程中的关键部件,其设计的合理性直接影响到产品的质量和生产效率。本文对注塑机合模机构进行了优化设计研究,通过分析合模机构的工作原理和设计要求,提出了一种综合考虑结构刚度、工作平稳性和操作便捷性的合模机构设计方案。通过数值模拟和实验验证,该方案在提高注塑产品质量的同时,还能提高生产效率。关键词:注塑机;合模机构;优化设计;质量;效率1.引言注塑成型技术是一种常用的塑料加工方法,注塑机是实现注塑成型的关键设备。合模机构作为注塑机