
模糊自适应整定PID控制.ppt

YY****。。


1/10
2/10
3/10
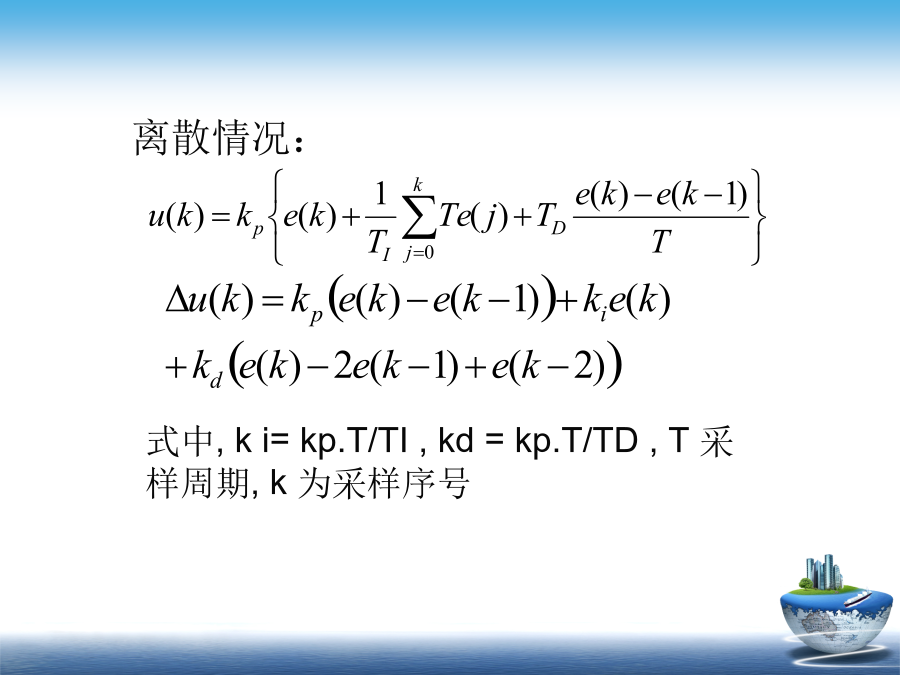
4/10

5/10
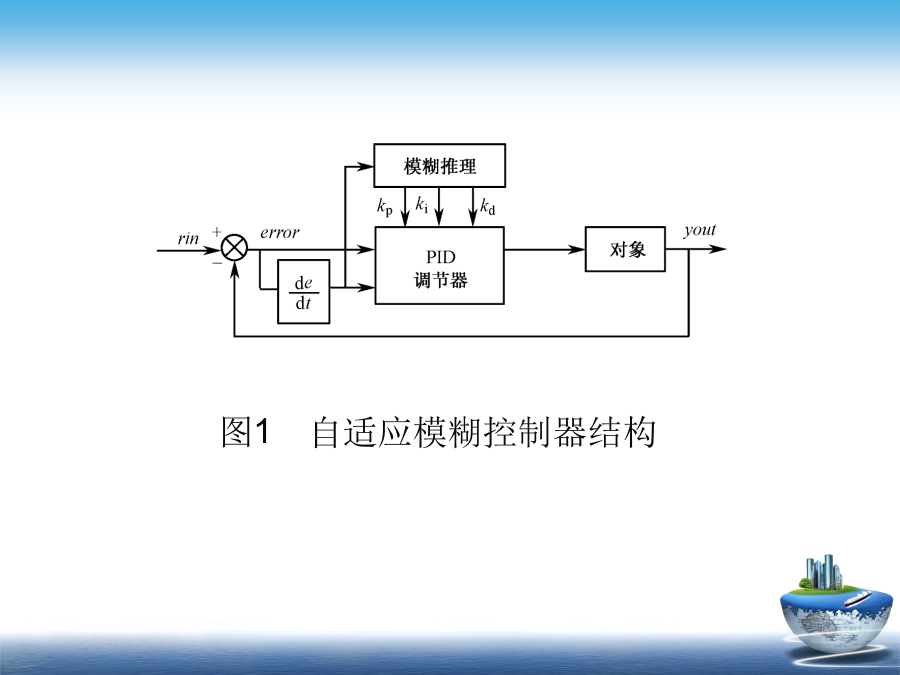
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

模糊自适应整定PID控制.ppt
整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt整理ppt

模糊自适应整定PID控制.ppt
模糊自适应整定PID控制PID控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的确定性控制系统。在控制理论和技术飞速发展的今天,工业过程控制领域仍有近90%的回路在应用PID控制策略。模糊控制对数学模型的依赖性弱,不需要建立过程的精确数学模型。因此,针对PID控制和模糊控制的各自特点,国内外学者分别采用不同的方法将模糊控制与PID控制相结合,研究出了多种模糊PID控制器。模糊自适应整定PID控制的概念:用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规

模糊自整定PID控制.docx
课程设计报告题目:模糊自整定PID控制飞控模型班级:智能科学与技术1101班姓名:韩超学号:110407119指导教师:于洪霞1.0系统概述三自由度直升机系统(简称直升机)由基座、平衡杆、平衡块和螺旋桨等部分组成。平衡杆以基座为支点,进行俯仰和转动动作。螺旋桨和平衡块分别安装在平衡杆的两端。螺旋桨旋转产生的升力可以使平衡杆以基座为支点做俯仰动作,利用两个螺旋桨的速度差可以使平衡杆以基座为轴做旋转动作。平衡杆的旋转轴、俯仰轴和螺旋桨的横侧轴分别安装了编码器用以测量平衡杆俯仰轴、旋转轴和螺旋桨横侧轴的数据。两

模糊自适应整定PID控制matlab仿真程序刘金锟先进PID控制及其MATLAB仿真.docx
这个例子的程序百度文库里有很多版本,但我下了很多都有错误,运行不了。以下程序我一字一字的敲出来的,已经成功运行,绝对无误。仿真实例,被控对象为(s)=采样时间为1ms,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,相应的运行结果如图1~13所示。仿真程序如下:将以下程序保存为fuzzypid.m文件,即可得到仿真结果。%fuzzytunningPIDcontrolclearall;clearall;a=newfis('fuzzpid');a=addvar(a,'input

用模糊控制自整定PID参数的研究.docx
用模糊控制自整定PID参数的研究摘要:本篇论文针对自整定PID控制系统的问题,提出了一种基于模糊控制的自整定PID参数算法。该算法通过模糊调节PID控制器的参数,以实现控制系统的自整定。在仿真实验中,该算法表现出较好的控制性能,比传统的PID控制器更加稳定和优异。关键词:自整定PID;模糊控制;控制系统;控制性能;仿真实验1.引言PID控制器是控制工程中最为常用的控制器之一。它通过调节控制器的比例、积分和微分三个参数,以实现对控制系统的精确控制。虽然PID控制器应用广泛,但是如何选择合适的PID参数以实现