
基于二倍频获取汽轮机转子临界转速的方法.pdf

An****70


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于二倍频获取汽轮机转子临界转速的方法.pdf
基于二倍频获取汽轮机转子临界转速的方法,它涉及一种获取汽轮机转子临界转速的方法。本发明为解决现有的获取汽轮机转子临界转速方法存在计算值与实测值误差大以及实测法存在很大的局限性的问题。步骤一、将汽轮机转子的转速最高升速至1800rpm,然后利用汽轮机振动监测系统中的二倍频Bode图确定临界转速位置;步骤二、将步骤一中二倍频Bode图的一阶临界转速位置的数值乘以二,得到的乘积数值即为汽轮机转子第一阶临界转速;步骤三、将步骤一中二倍频Bode图的二阶临界转速位置的数值乘以二,得到的乘积数值即为汽轮机转子第二阶临

汽轮机转子临界转速实验研究.pdf
汽轮机转子临界转速实验研究潘宏刚;郑飞飞;夏永放;崔洁【摘要】转子临界转速的计算方法有很多种,但是计算结果与实际误差较大.通过转子临界转速实验测量装置,利用伯德图法、频谱分析法和李莎茹图法对转子的临界转速进行测量,分析并比较了3种测量方法的优缺点.实验结果表明,伯德图法对转子临界转速的测量结果较为准确,并能直观地反映出转子在不同转速时刻下对应的相位,为后期转子临界转速影响分析及其灵敏度分析打下基础.【期刊名称】《沈阳工程学院学报(自然科学版)》【年(卷),期】2016(012)004【总页数】5页(P31

汽轮机转子临界转速的仿真分析与验证.docx
汽轮机转子临界转速的仿真分析与验证I.IntroductionSteamturbineisacrucialcomponentinapowergenerationsystem.Thereliableandefficientoperationofasteamturbinedependslargelyonthedesignoftherotoranditscriticalspeed.Thecriticalspeedistherotationalspeedatwhichtherotorexperiencesreso
一种基于CN群理论确定汽轮机转子临界转速的方法及系统.pdf
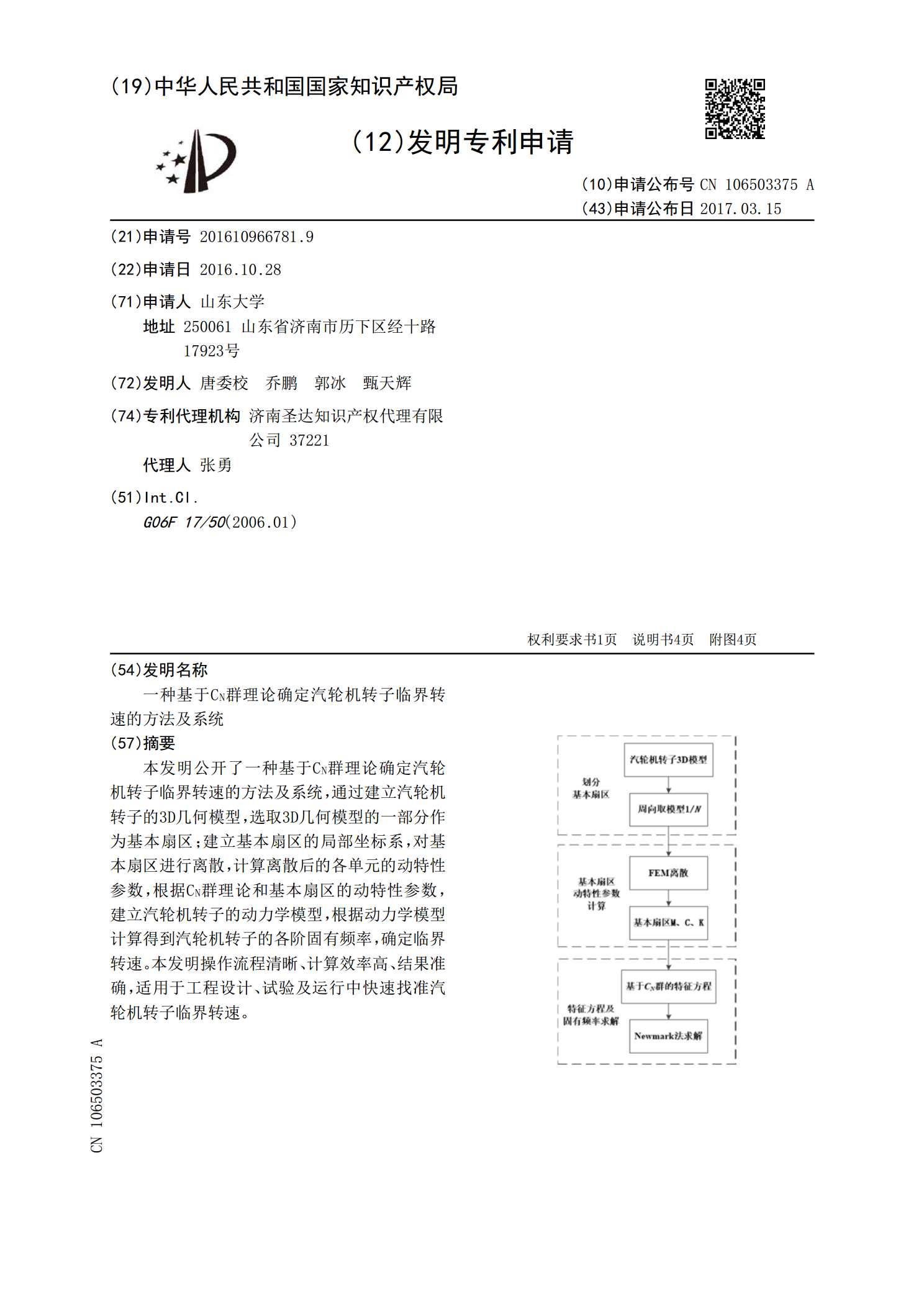
本发明公开了一种基于C

论实验确定转子临界转速的方法.docx
论实验确定转子临界转速的方法标题:实验方法研究转子临界转速确定摘要:转子临界转速是指在特定条件下,转子所能承受的最高转速。确定转子的临界转速对于设计和安装旋转机械具有重要意义。本论文旨在探讨实验方法确定转子临界转速,分析各种实验技术和路径对于准确测定临界转速的影响,以促进实验方法的发展和运用。1.引言转子的临界转速是指一个转子所能承受的最高转速,在超过这个转速后,转子会失去稳定性,产生共振现象,甚至引发破损和事故。因此,了解和确定转子的临界转速是设计和运行转子设备的重要任务。2.实验方法及设计2.1实验设