
一种基于直驱式电机的凸轮轮廓检测系统.pdf

秀美****甜v


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于直驱式电机的凸轮轮廓检测系统.pdf
本发明提供了一种结构简单、检测精度和效率较高的基于直驱式电机的凸轮轮廓检测系统,其包括:直驱式电机、同轴固定设于直驱式电机的转子上的用于带动凸轮同步同轴旋转的心轴、水平设于凸轮一侧的丝杠螺母副、设于该丝杠螺母副的活动螺母上的激光测量头、用于测量所述活动螺母的水平位移量的光栅尺位移传感器、设于直驱式电机的固定座中的用于检测所述转子的旋转角度的圆光栅、以及工控机;所述工控机控制所述直驱式电机和丝杠螺母副动作,并根据所述激光测量头、光栅尺位移传感器和圆光栅测得的数据得出凸轮的外轮廓数据。

一种基于直驱式电机的凸轮轮廓检测系统.pdf
本发明提供了一种结构简单、检测精度和效率较高的基于直驱式电机的凸轮轮廓检测系统,其包括:直驱式电机、同轴固定设于直驱式电机的转子上的用于带动凸轮同步同轴旋转的心轴、水平设于凸轮一侧的丝杠螺母副、设于该丝杠螺母副的活动螺母上的激光测量头、用于测量所述活动螺母的水平位移量的光栅尺位移传感器、设于直驱式电机的固定座中的用于检测所述转子的旋转角度的圆光栅、以及工控机;所述工控机控制所述直驱式电机和丝杠螺母副动作,并根据所述激光测量头、光栅尺位移传感器和圆光栅测得的数据得出凸轮的外轮廓数据。

基于直驱式电机的凸轮轮廓检测系统的检测方法.pdf
本发明提供了一种结构简单、检测精度和效率较高的基于直驱式电机的凸轮轮廓检测系统的检测方法,其包括:直驱式电机、同轴固定设于直驱式电机的转子上的用于带动凸轮同步同轴旋转的心轴、水平设于凸轮一侧的丝杠螺母副、设于该丝杠螺母副的活动螺母上的激光测量头、用于测量所述活动螺母的水平位移量的光栅尺位移传感器、设于直驱式电机的固定座中的用于检测所述转子的旋转角度的圆光栅、以及工控机;所述工控机控制所述直驱式电机和丝杠螺母副动作,并根据所述激光测量头、光栅尺位移传感器和圆光栅测得的数据得出凸轮的外轮廓数据。
一种直驱式顶驱电机.pdf
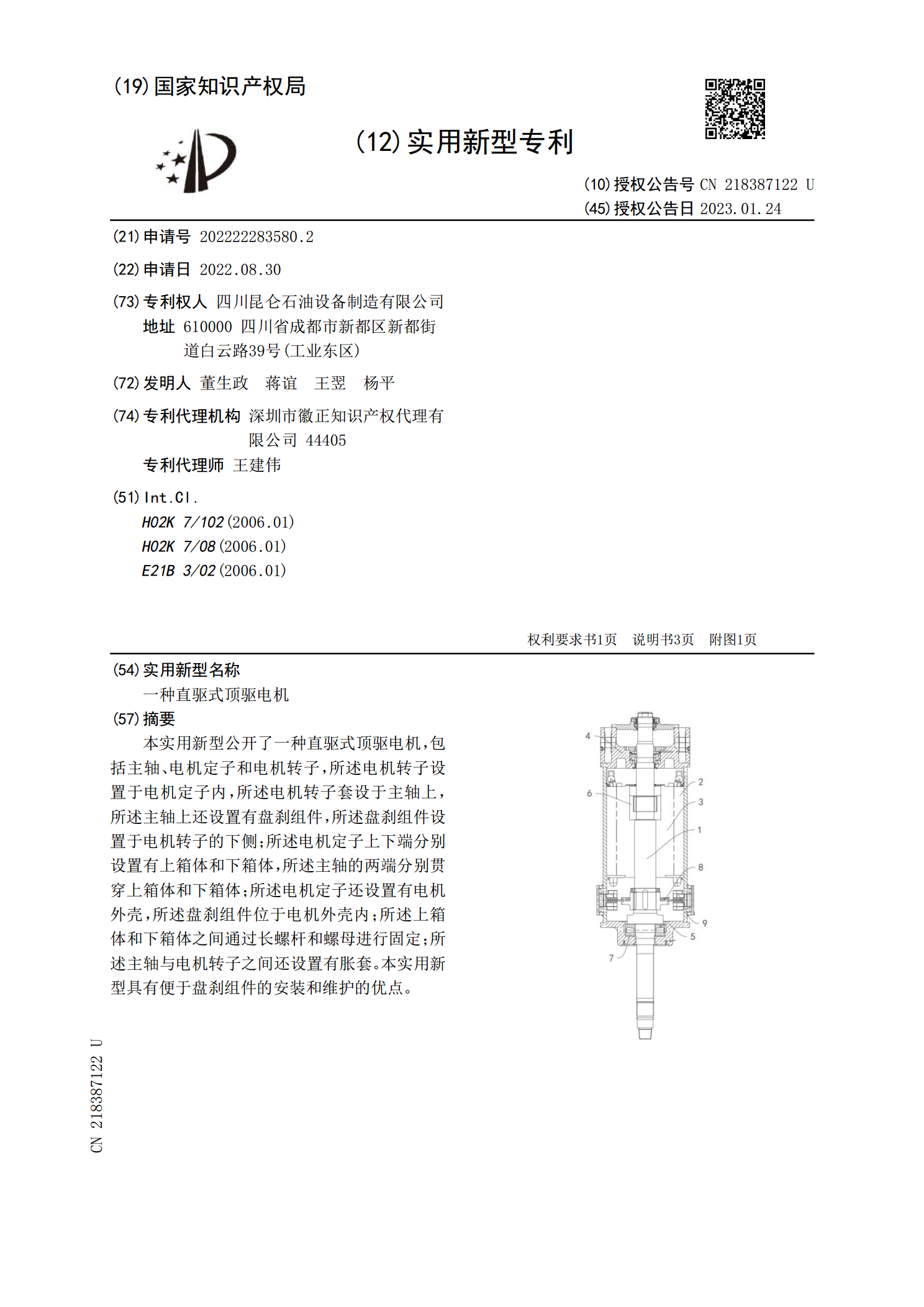
本实用新型公开了一种直驱式顶驱电机,包括主轴、电机定子和电机转子,所述电机转子设置于电机定子内,所述电机转子套设于主轴上,所述主轴上还设置有盘刹组件,所述盘刹组件设置于电机转子的下侧;所述电机定子上下端分别设置有上箱体和下箱体,所述主轴的两端分别贯穿上箱体和下箱体;所述电机定子还设置有电机外壳,所述盘刹组件位于电机外壳内;所述上箱体和下箱体之间通过长螺杆和螺母进行固定;所述主轴与电机转子之间还设置有胀套。本实用新型具有便于盘刹组件的安装和维护的优点。

直驱式积极凸轮开口机构.pdf
本发明公开了一种直驱式积极凸轮开口机构,包括连接在综框上的直驱凸轮装置,所述直驱凸轮装置通过连杆与综框相连接,所述连杆包括第一连杆和第二连杆,所述第一连杆一端与直驱凸轮装置连接,另外一端与第二连杆前端连接,第二连杆末端与综框相连接。通过上述方式,本发明所述的直驱式积极凸轮开口机构,传动简单可靠,运动构件少、传动轻量化、减少运动摩擦副、降低摩擦损耗,同时将织机转速提高到单凸轮开口装置无法达到的车速,改善了凸轮片的受力情况,延长凸轮开口装置的使用寿命,能够实现宽幅织机高速开口。