
基于动态调节步长的AGC机组控制方法.pdf

文宣****66


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于动态调节步长的AGC机组控制方法.pdf
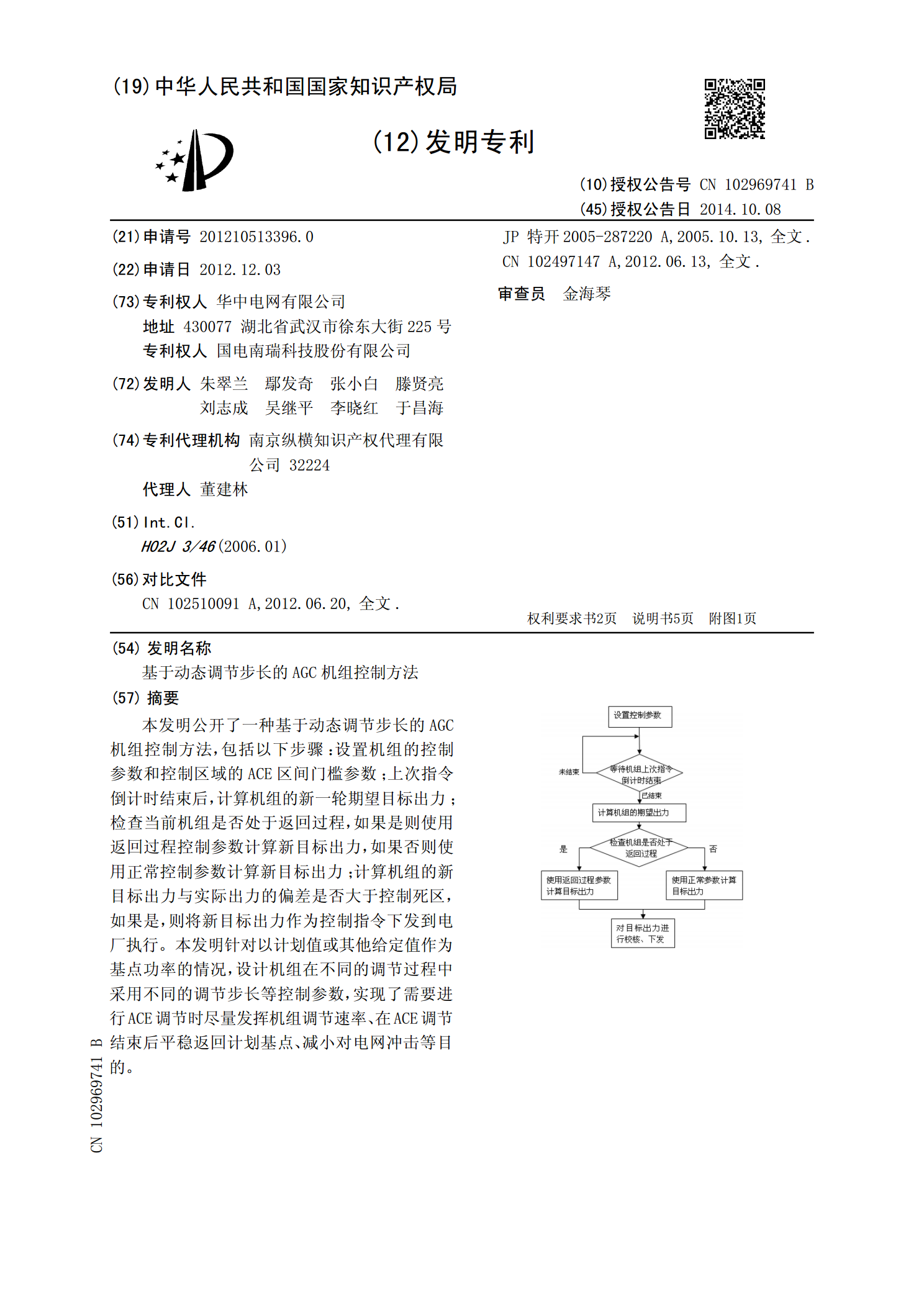
本发明公开了一种基于动态调节步长的AGC机组控制方法,包括以下步骤:设置机组的控制参数和控制区域的ACE区间门槛参数;上次指令倒计时结束后,计算机组的新一轮期望目标出力;检查当前机组是否处于返回过程,如果是则使用返回过程控制参数计算新目标出力,如果否则使用正常控制参数计算新目标出力;计算机组的新目标出力与实际出力的偏差是否大于控制死区,如果是,则将新目标出力作为控制指令下发到电厂执行。本发明针对以计划值或其他给定值作为基点功率的情况,设计机组在不同的调节过程中采用不同的调节步长等控制参数,实现了需要进行A
自适应AGC工况的火电机组变负荷动态前馈控制方法.pdf
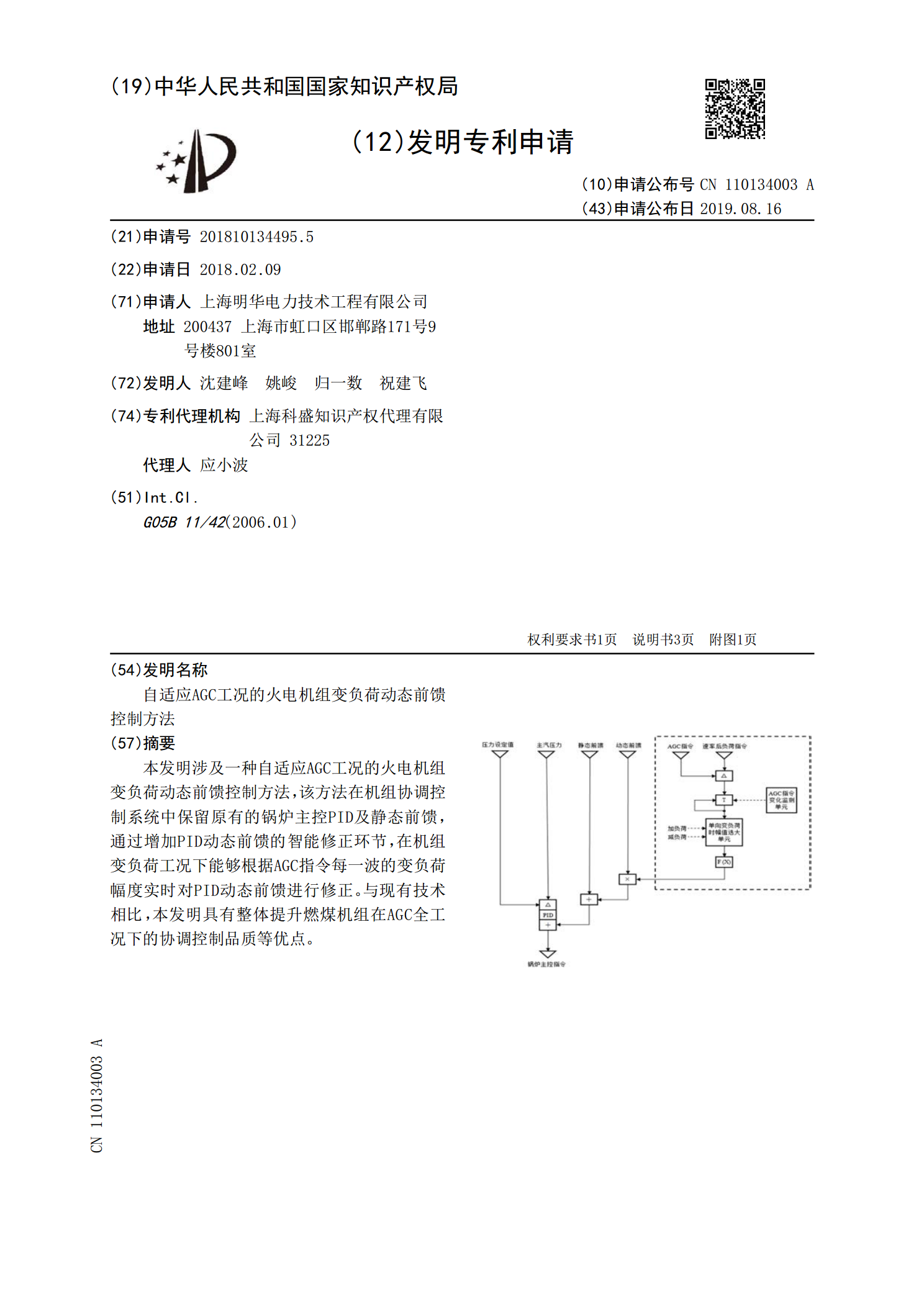
本发明涉及一种自适应AGC工况的火电机组变负荷动态前馈控制方法,该方法在机组协调控制系统中保留原有的锅炉主控PID及静态前馈,通过增加PID动态前馈的智能修正环节,在机组变负荷工况下能够根据AGC指令每一波的变负荷幅度实时对PID动态前馈进行修正。与现有技术相比,本发明具有整体提升燃煤机组在AGC全工况下的协调控制品质等优点。

隔河岩电厂AGC控制策略及机组有功调节分析.docx
隔河岩电厂AGC控制策略及机组有功调节分析隔河岩电厂AGC控制策略及机组有功调节分析一、引言隔河岩电厂是我国重要的水电站之一,其机组的稳定运行对电网的稳定性和电力供应的可靠性具有重要意义。为了实现对电网频率的有力调节,并保证机组出力及有功调节的精度和可靠性,AGC(AutomaticGenerationControl)控制策略被广泛应用于电力系统中。本文将对隔河岩电厂的AGC控制策略及机组有功调节进行详细分析。二、AGC控制策略AGC控制策略是通过测量电网频率并将其与设定值进行比较来调节机组出力。基于隔河

基于激励因子的AGC机组辅助服务评估方法.docx
基于激励因子的AGC机组辅助服务评估方法基于激励因子的AGC机组辅助服务评估方法摘要:自动发电控制(AGC)是电网调度运行中的重要环节之一,其能够实现对机组的调度控制,以保持电网频率的稳定。为了确保AGC机组能够提供有效的辅助服务,需要对其进行评估。本文提出了一种基于激励因子的AGC机组辅助服务评估方法。首先,通过分析激励因素的相关参数,构建了辅助服务的激励因子模型。然后,根据实际运行数据对模型进行建模,并计算得到机组的激励因子值。最后,通过激励因子值的综合评估,对机组的辅助服务进行评价。实验结果表明,该

提高机组AGC调节精度及速度的技术改进.docx
提高机组AGC调节精度及速度的技术改进随着电力系统的飞速发展,越来越多的电站建设和投运,AGC调节精度及速度成为了电网调度中非常重要的一环。AGC的全称是AutomaticGenerationControl,即自动发电机控制,是电网调度中的一个重要环节。AGC技术的发展与成熟,为电网的安全稳定运行和调度管理提供了有力的保障。本文将围绕如何提高机组AGC调节精度及速度的技术改进这个话题展开讨论。一、AGC调节精度及速度的概述1.1AGC调节精度的含义AGC是指在一定时间范围内,对机组的有功出力进行自动调节,