
一种基于时延的水下声基阵坐标估算方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于时延的水下声基阵坐标估算方法.docx
一种基于时延的水下声基阵坐标估算方法水下声学定位技术是利用水下声基阵来实现水下目标的密集定位和跟踪的重要手段之一。声基阵定位的实现依赖于定位算法,而定位算法的质量和精度直接影响水下目标定位的准确度和稳定性。本文主要介绍一种基于时延的水下声基阵坐标估算方法。一、水下声学基阵定位简介声基阵定位技术通过水下接收器阵列的接收信号,计算任意水下位置目标与接收器的空间关系,以推算目标的具体空间位置信息。声基阵定位是依据阵列接收到的同一目标回波声信号相位差异来确定目标的位置,因此,其定位精度和稳定性主要取决于相位误差的
一种多元阵次声时延估计方法.pdf
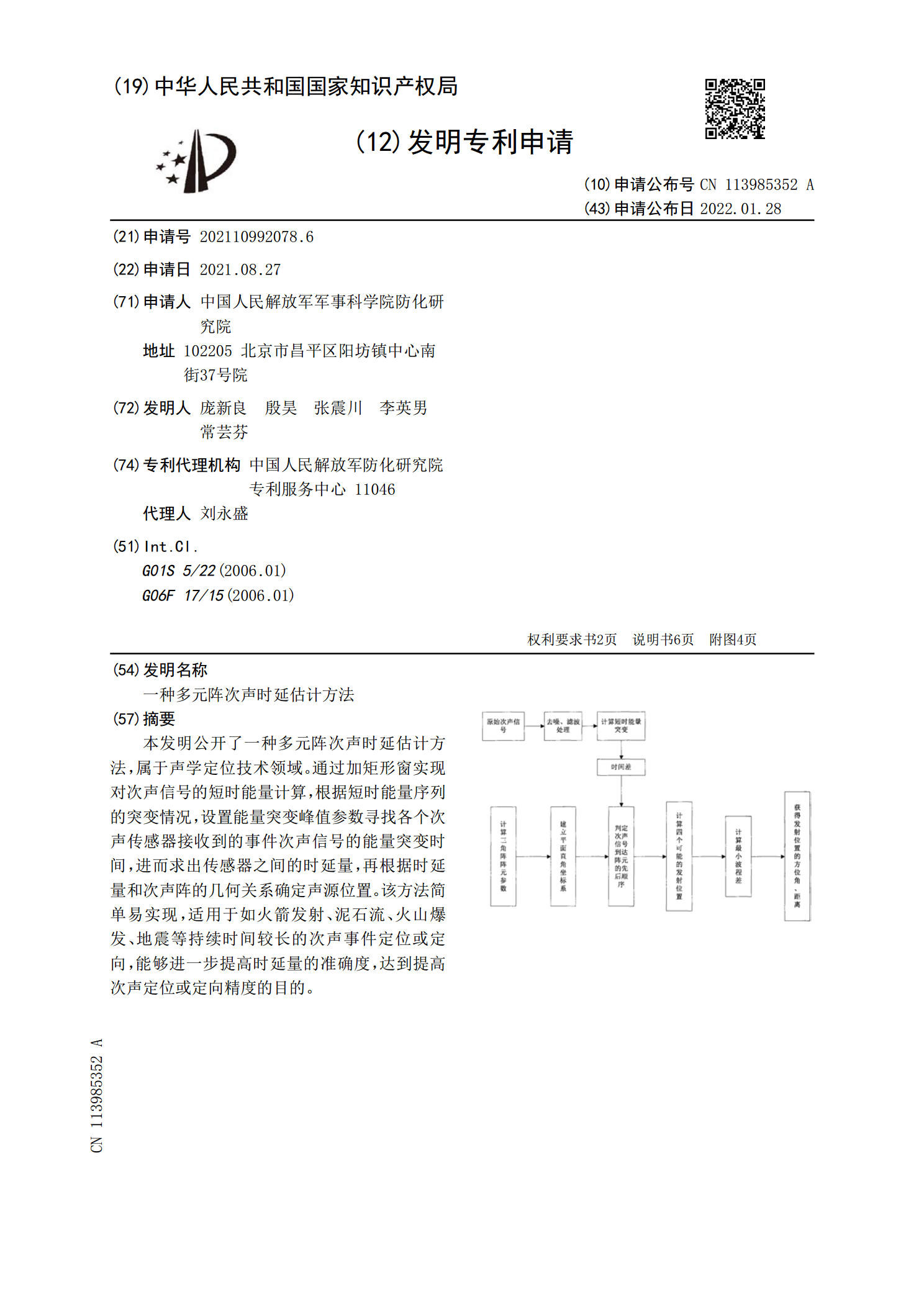
本发明公开了一种多元阵次声时延估计方法,属于声学定位技术领域。通过加矩形窗实现对次声信号的短时能量计算,根据短时能量序列的突变情况,设置能量突变峰值参数寻找各个次声传感器接收到的事件次声信号的能量突变时间,进而求出传感器之间的时延量,再根据时延量和次声阵的几何关系确定声源位置。该方法简单易实现,适用于如火箭发射、泥石流、火山爆发、地震等持续时间较长的次声事件定位或定向,能够进一步提高时延量的准确度,达到提高次声定位或定向精度的目的。

水下基阵大地坐标优质解算点的选择方法.docx
水下基阵大地坐标优质解算点的选择方法选择水下基阵大地坐标优质解算点的方法摘要:水下基阵大地坐标解算是海洋测绘和海洋资源开发中的重要任务之一。优质解算点的选择对于数据的准确性和精度至关重要。本文将介绍水下基阵大地坐标解算方法和选择优质解算点的几种常用方法。引言:水下基阵大地坐标解算是指通过水下基站与陆地基站之间的通信进行水下基阵的坐标计算。它是一种基于全球导航卫星系统(GNSS)和水下声纳技术的定位方法,广泛应用于海洋岛屿调查、海底矿产资源勘探、海底工程建设等领域。选择优质解算点是保证大地坐标解算结果准确性

一种浮标声基阵的水下姿态实时监测系统.pdf
本发明公开了一种浮标声基阵的水下姿态实时监测系统,主要包括岸基数据接收端、水面发射端、水下测试端,水下测试端对声基阵水下姿态进行实时监测,并将采集好的数据传到水面发射端,水面发射端接收水下测试端发送的数据,并将接收到的数据通过无线发射电台发送出去至岸基数据接收端,岸基数据接收端实时接收数据,并将接收到的数据进行存储并实时绘制水下运动姿态图表,将当前运动状态实时展示给试验人员。本发明能够实时捕捉监测声基阵在复杂的水下环境中的运动姿态;监测变得更加灵活,同时提高了监测的实时性,并且能够在测试人员不能长时间驻留

一种基于振动数据的水下大型结构声辐射估算方法研究.docx
一种基于振动数据的水下大型结构声辐射估算方法研究论文导读::提出一种利用水下大型结构体表振动监测数据加权的结构声辐射估算方法,在假定水下大型结构体辐射噪声与若干振动监测点数据之间存在一种多输入单输出的具有收敛特性的函数关系的基础上,采用指数加权方法估算结构声辐射。通过仿真数据与实测数据验证,证明该方法是可行的,有效地,具有转化为工程应用的可行性。论文关键词:水下大型结构,声辐射,振动数据引言一般来说,水下大型结构声辐射估算方面的研究,主要集中在以下几个方面:1)通过解析方法对圆柱壳体等规则目标进行振动声辐