
一种可移动物体定位取放装置.pdf

一吃****昕靓


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可移动物体定位取放装置.pdf
本发明涉及机电控制领域,具体涉及一种具有自动搜寻取放点并完成取放物体功能的定位取放装置。本发明包括框架、滚珠滑道、同步带轮、伺服电机、舵机、机械手、激光阵列,机械手设置在第三同步带轮与第四同步带轮控制的第三滚珠滑道上,长方体结构框架的底层设有检测物体位置的激光阵列。本发明整个控制过程采用大闭环的控制方式,故能够快速精确定位可移动物体的位置并完成取放动作;因为控制算法简单,能够在单片机级别的处理能力基础上实现功能,使整个装置的重量减轻,价格降低,容易实现量产。

一种CPU自动取放模组的自适应定位装置.pdf
本发明公开了一种CPU自动取放模组的自适应定位装置,包括机架,CPU夹持组件,所述的CPU夹持组件上设有多个定位柱脚,多个所述的定位柱脚下部内侧面设有导向角,多个所述的定位柱脚与主板的CPU安装座外侧轮廓匹配,所述的机架上沿竖直方向滑动连接有滑动连接座,所述的滑动连接座上连接有随动平台组件,所述的可供CPU夹持组件连接在随动平台组件上使得CPU夹持组件可以在任意方向自适应移动;本发明能自适应地调整CPU安装时CPU与CPU安装座的相对位置,使CPU和CPU安装座完全吻合,避免CPU和CPU安装座不完全吻合

可移动的放脸盆的装置.pdf
本发明涉及一种装置,具体涉及可移动的放脸盆的装置。其特征在于:该装置由脸盆1、档杆2、托盘3、支架4、万向轮5组成;所述的脸盆1放置于档杆2里;所述的托盘3安装在支架4的上部;所述的万向轮5安装在支架4的底部。本发明的可移动的放脸盆的装置结构简单,安全,提升品质,给消费者带来方便;本发明具有广阔的推广应用前景,可以广泛地应用于学校宿舍;有孕妇、有病号、有宝宝的家庭中。
一种图书馆用图书移动取放装置.pdf
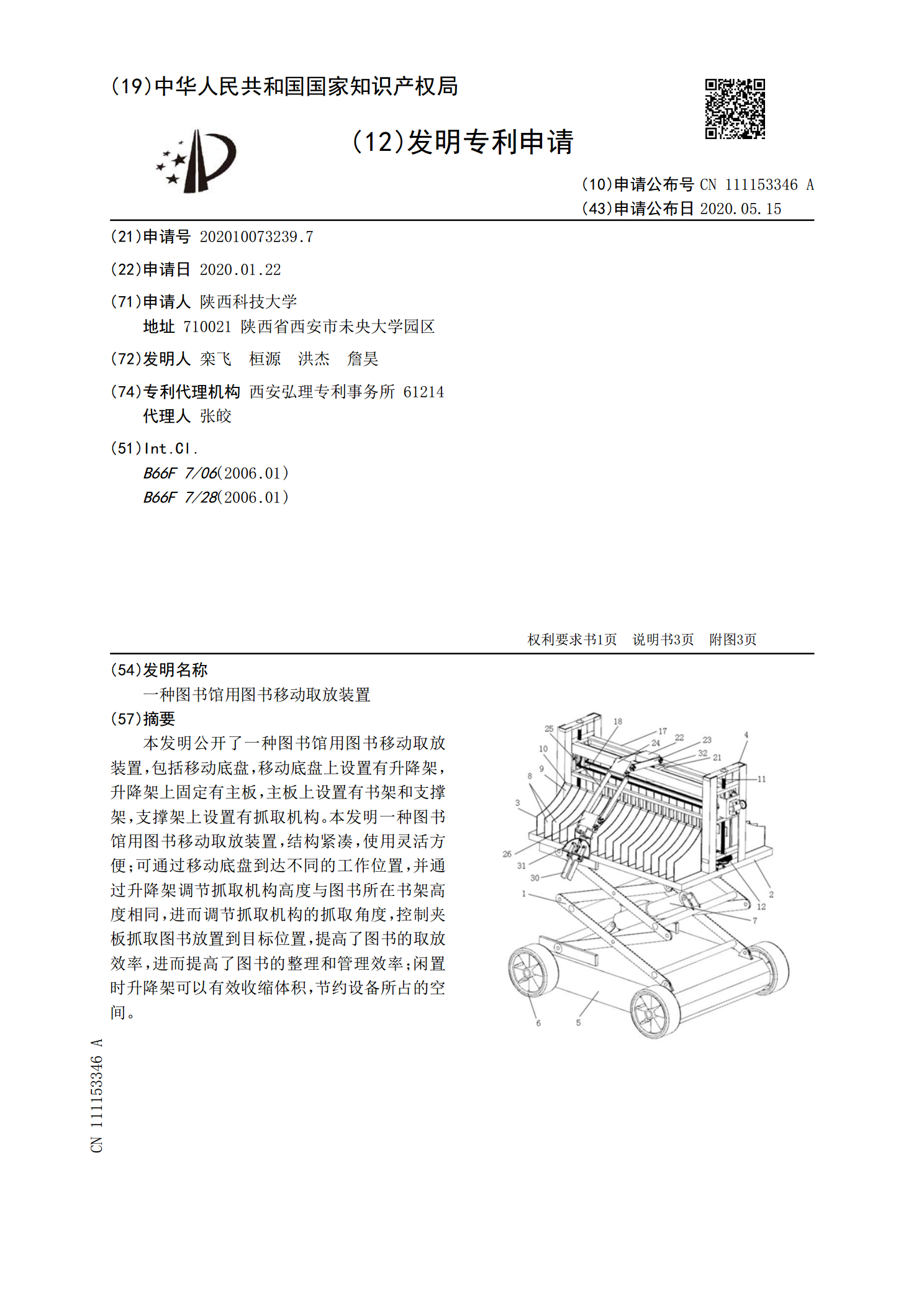
本发明公开了一种图书馆用图书移动取放装置,包括移动底盘,移动底盘上设置有升降架,升降架上固定有主板,主板上设置有书架和支撑架,支撑架上设置有抓取机构。本发明一种图书馆用图书移动取放装置,结构紧凑,使用灵活方便;可通过移动底盘到达不同的工作位置,并通过升降架调节抓取机构高度与图书所在书架高度相同,进而调节抓取机构的抓取角度,控制夹板抓取图书放置到目标位置,提高了图书的取放效率,进而提高了图书的整理和管理效率;闲置时升降架可以有效收缩体积,节约设备所占的空间。

一种便于取放的可切换移动洗衣机底衬.pdf
本发明公开了一种便于取放的可切换移动洗衣机底衬,其结构包括:洗衣机衬底、洗衣机、显示屏、控制面板、洗衣机门,洗衣机的下端采用嵌套的方式连接于洗衣机衬底的内部上端,本发明解决了传统市面上大多数滚筒洗衣机采用的是在底衬下安装四个橡胶轮来便于移动,但是由于滚筒洗衣机在运作时利用离心式洗涤或者甩干,其过程会让洗衣机发生较大的晃动,导致洗衣机发生移位的现象,造成该洗衣机无法实现在运作时可以防止偏移,在搬运时方便移动,而且市面上的滚筒洗衣机普遍较矮,对于家里有老人而言,老人的腰部较为不好,而每次取放衣物时都要弯腰,导