
禽蛋在线裂纹检测触发敲击的方法及装置.pdf

书生****萌哒


1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

禽蛋在线裂纹检测触发敲击的方法及装置.pdf
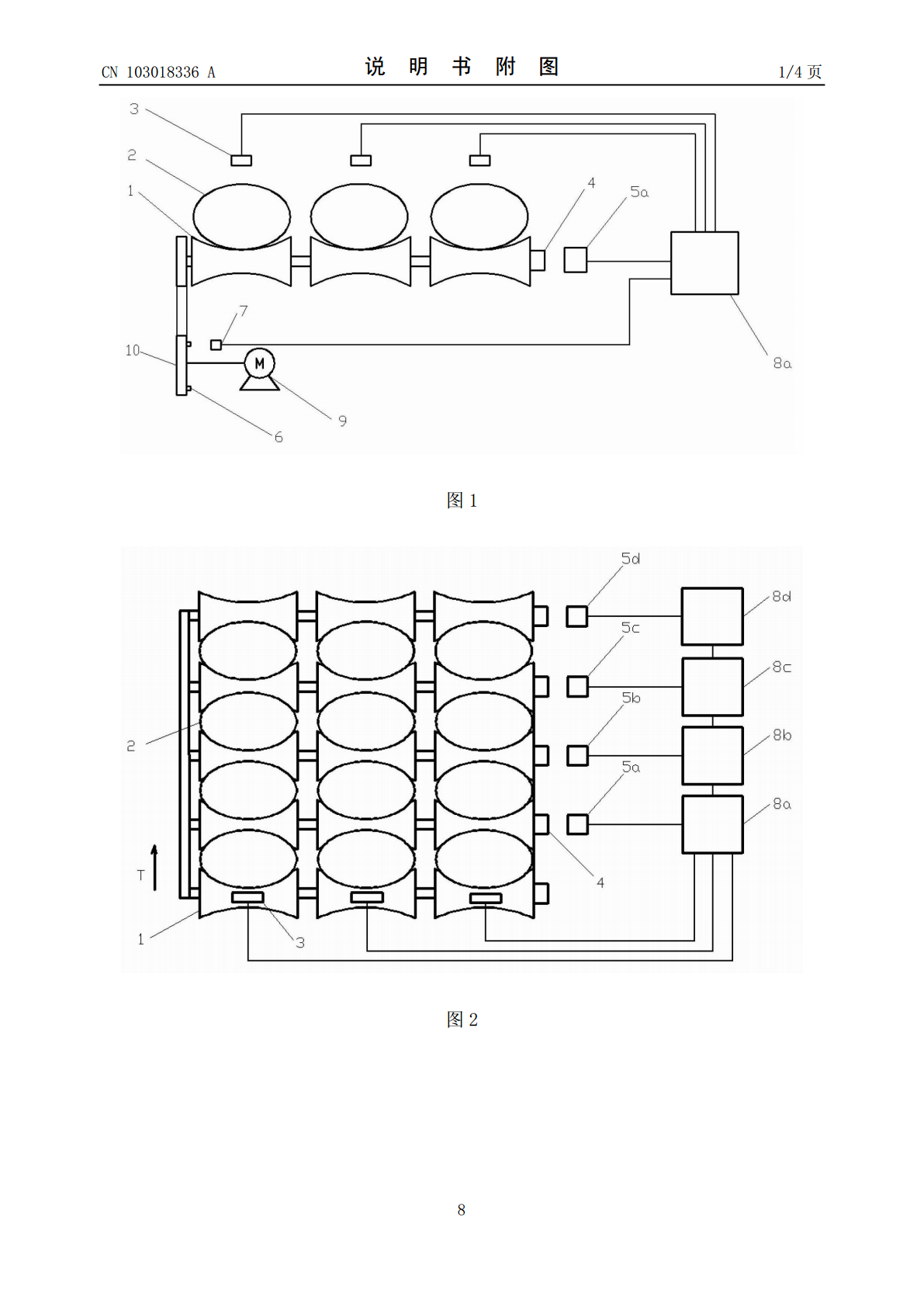
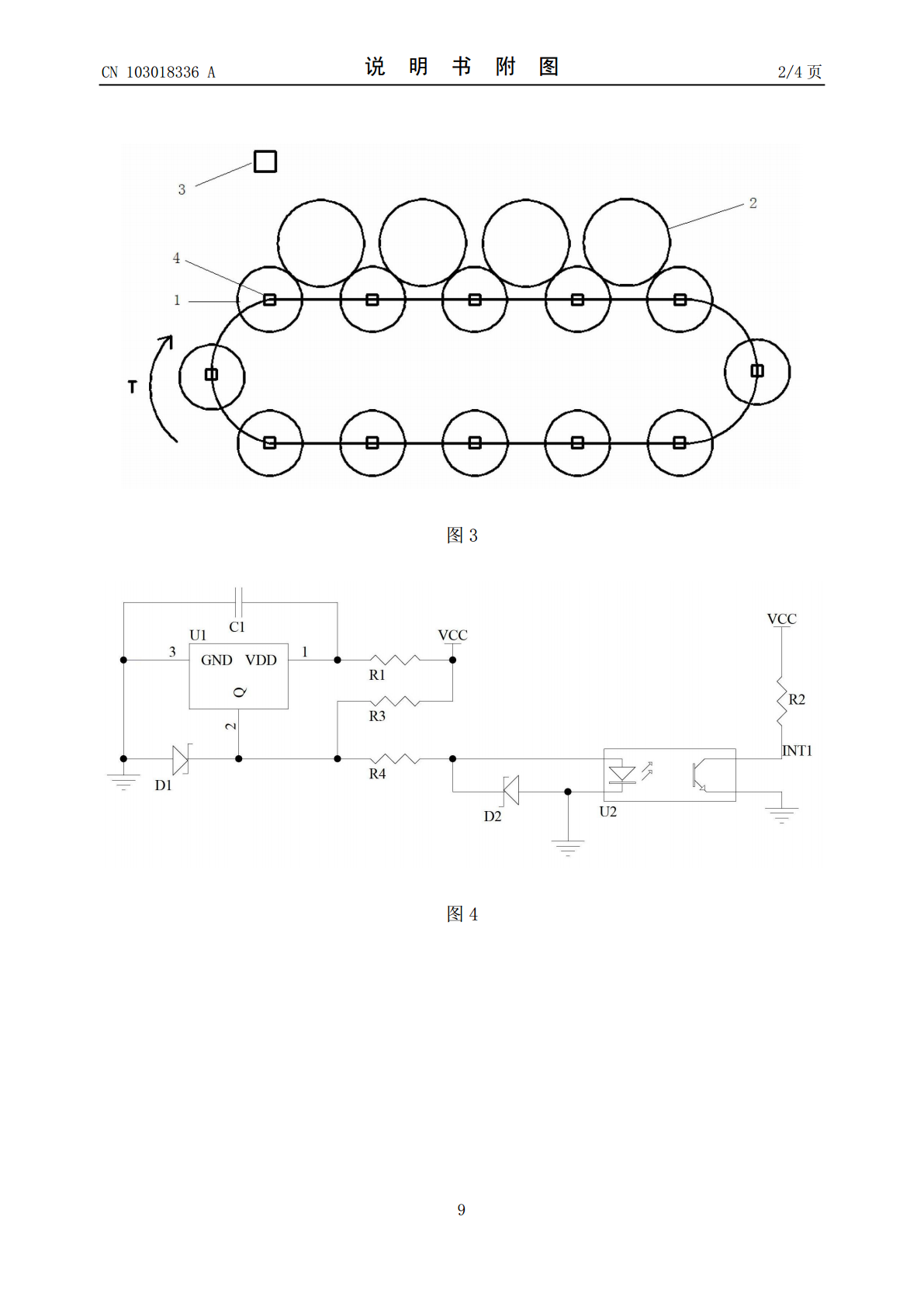
本发明公开了一种禽蛋在线裂纹检测触发敲击方法及装置。驱动电机上装有驱动轮,经传动带带动传送带前进,禽蛋放在多排、三列传送带的支撑滚轮之间,每排支撑滚轮一个轴端分别安装有检测禽蛋位置的磁钢,用于检测禽蛋位置的霍尔传感器等间距固定安装在机架上与磁钢对应,并且与单片机连接;驱动轮端面上每隔90°均匀安装检测禽蛋前进速度的磁钢,磁钢外侧安装的检测禽蛋位置的霍尔传感器与单片机连接;用于检测禽蛋是否空缺的三个颜色传感器分别安装在进入检测之前禽蛋对应位置的正上方,传感器与单片机连接。本发明在不同的禽蛋传输速度下,实时调

一种弹性条激励式禽蛋全表面裂纹在线检测装置.pdf
本发明公开了一种弹性条激励式禽蛋全表面裂纹在线检测装置。沿禽蛋输送方向的两侧设有销轴滚子链,空心轴活动套在销轴辊子链的销轴中自转;禽蛋置于相邻空心轴之间被凹型辊子承托,空心轴的一侧固定套有同步轮,同步轮与正下方的同步带啮合;凹型辊子的正上方沿禽蛋输送方向间隔均布有多个弹性条激励机构,每个禽蛋自转前进时碰撞弹性条激励机构拨动各个弹性条产生压电信号和声音信号,经信号调理电路与数据采集与处理系统连接。本发明能实现实际的禽蛋全表面裂纹在线检测,能够检测禽蛋赤道及其两侧的蛋壳表面裂纹以及大端小端的裂纹,提高裂纹的检

基于声学的禽蛋裂纹检测关键技术及在线检测研究.docx
基于声学的禽蛋裂纹检测关键技术及在线检测研究标题:基于声学的禽蛋裂纹检测关键技术及在线检测研究摘要:随着禽蛋产业的快速发展,禽蛋的质量与安全问题也受到了广泛关注。其中,裂纹是禽蛋常见的质量问题之一。传统的禽蛋裂纹检测方法存在人工盲区大、效率低、不便于实时监测等问题。本文主要针对禽蛋裂纹检测技术进行研究,重点介绍了基于声学的禽蛋裂纹检测关键技术及在线检测方法,为禽蛋产业提供更高效、精确的质量检测手段。关键词:禽蛋;裂纹检测;声学检测;关键技术;在线检测1.引言禽蛋是人们日常生活的重要食材之一,其品质与安全直

基于图像处理的受电弓裂纹在线检测装置及方法.pdf
本发明公开了一种基于图像处理的受电弓裂纹在线检测装置及方法。该装置包括:触发和控制装置、图像采集装置、补光装置;触发和控制装置包括第一车轮轴位传感器、车号识别天线和第二车轮轴位传感器;图像采集装置为高清摄像机;补光装置包括补光灯和控制箱。方法为:首先对裂纹图像进行预处理,运用两次改进的中值滤波算法消除噪声,并分割滑板区域图像;然后采取基于局部标准差的局部对比度增强算法,对目标区域进行增强;接着使用自适应阈值的Canny边缘检测算法,分割滑板区域图像,最后使用二代曲波变换的裂纹检测算法识别裂纹,并计算识别到

基于声学的禽蛋裂纹检测关键技术及在线检测研究的任务书.docx
基于声学的禽蛋裂纹检测关键技术及在线检测研究的任务书任务书一、课题背景及目的禽蛋是人类的主要食品之一,其营养价值高,深受人们的喜爱。然而,在禽蛋的生产和运输过程中,往往会出现裂纹现象,这不仅会影响禽蛋的外观和质量,还会影响到消费者的健康和食品安全。因此,禽蛋的裂纹检测是禽蛋质量安全控制的重要环节。基于声学的禽蛋裂纹检测技术已经得到广泛应用,但其在实际应用中还存在一些问题,例如检测精度不高、检测速度慢等。因此,本课题旨在研究和开发基于声学的禽蛋裂纹检测关键技术,并实现在线检测。二、研究内容1.基于声学的禽蛋