
一种带有自平衡功能的空间扫描支架.pdf

灵慧****89


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种带有自平衡功能的空间扫描支架.pdf
本发明涉及卫星扫描系统,公开了一种带有自平衡功能的空间扫描支架。包括:一个具有两个滑道及两个滑块的方位扫描支架[5]安装于弧形支架[4]上,弧形支架[4]带有内齿弧及弧形滑道;载荷仪器[7]和配重[1]安装在方位扫描支架[5]的两侧,分别通过滚轮在方位扫描支架[5]的滑道上做速度方向相反的摆动扫描,载荷仪器围绕回转中心的转动惯量与回转速度的乘积与配重围绕回转中心的转动惯量与回转速度的乘积相等且方向相反。本发明解决了现有扫描机构存在的控制系统复杂,制造成本高以及结构设计不合理等问题,取得了减轻卫星姿轨控系统

一种带有自平衡功能的树木种植挖坑机.pdf
本发明公开了一种带有自平衡功能的树木种植挖坑机,包括挖坑架,所述挖坑架为U形槽架,且挖坑架的开口处固定连接有固定底板,所述挖坑架内设置有旋转电机,且旋转电机设置在挖坑架上远离开口处的一端,所述旋转电机上连接有搅动轴,且搅动轴设置在挖坑架的U形槽架内,所述挖坑架内设置有平衡装置,且平衡装置设置在挖坑架内远离固定底板的一侧,所述平衡装置包括限位环、固定圈、平衡撑和平衡弹簧,所述挖坑架的内设置有限位环。本发明中,通过设置可以移动的挖坑架,结构简单,便于移动,而且,底部移动轮移动,可以减少人工用力,通过设置平衡装

一种带有防雷功能的蜂箱支架.pdf
一种带有防雷功能的蜂箱支架,本发明属于养殖蜜蜂领域设备技术,尤其为一种带有防雷功能的蜂箱支架,包括:避雷针、铁质支架,所述支架上安装有避雷针,以实现对雷电的引导,通过铁质四脚导入大地从而保护放置于支架上的蜂箱不被雷电击毁,保证了蜂箱安全,避免了因雷击造成的损失。
一种带有多功能支架的平板电脑.pdf
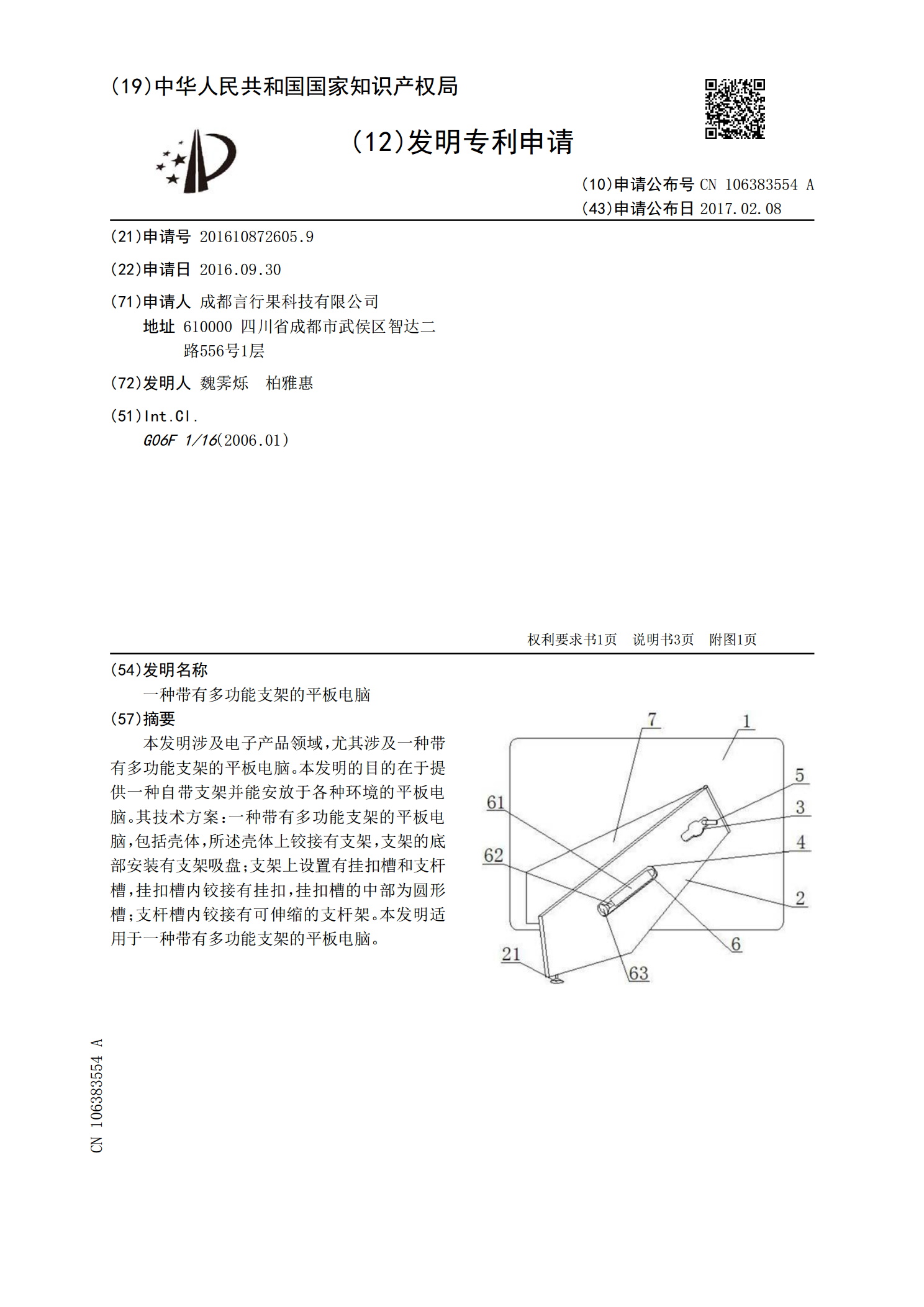
本发明涉及电子产品领域,尤其涉及一种带有多功能支架的平板电脑。本发明的目的在于提供一种自带支架并能安放于各种环境的平板电脑。其技术方案:一种带有多功能支架的平板电脑,包括壳体,所述壳体上铰接有支架,支架的底部安装有支架吸盘;支架上设置有挂扣槽和支杆槽,挂扣槽内铰接有挂扣,挂扣槽的中部为圆形槽;支杆槽内铰接有可伸缩的支杆架。本发明适用于一种带有多功能支架的平板电脑。

一种带有半自动驾驶功能的自平衡电动摩托车.pdf
本发明公开了一种带有半自动驾驶功能的自平衡电动摩托车,它使用惯性传感器和摄像头融合,依靠角度传感器实时测量车身滚动角,并利用动力学模型和欠驱动系统控制转向电机、车轮驱动电机和前后轮刹车保持车辆平衡。摩托车由前轮系统、转弯电机、方向盘、坐垫、后轮系统、自动起落架、控制系统、脚踏板、车架、以及视觉传感摄像头组成,本发明的平衡车具有与目前市面上存在平衡车不同的特点,它不需要耗能极高的飞轮高速旋转来保持车身的平衡,只需要一个相对简单耗能极低的平衡控制器来保持车身的平稳平衡行驶。具有很强的实用性。