
搓扭角度可调的光纤搓扭设备及光纤搓扭方法.pdf

邻家****mk

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

搓扭角度可调的光纤搓扭设备及光纤搓扭方法.pdf
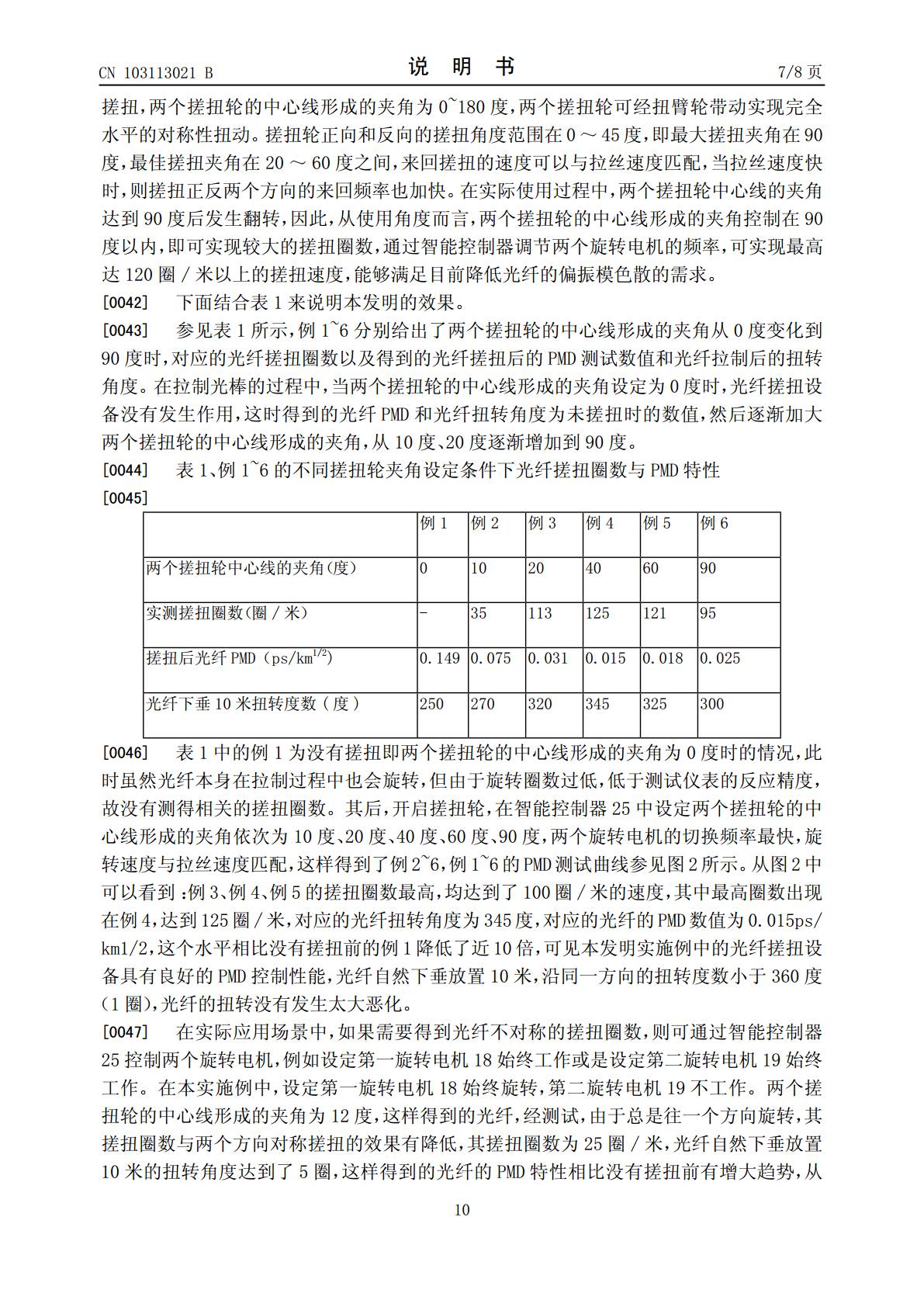
本发明公开了一种搓扭角度可调的光纤搓扭设备及光纤搓扭方法,涉及光纤领域,该光纤搓扭设备包括第一搓扭轮、第二搓扭轮、第一传动机构、第二传动机构、第一旋转电机、第二旋转电机、导线、智能控制器,第一搓扭轮通过第一传动机构与第一旋转电机相连,第二搓扭轮通过第二传动机构与第二旋转电机相连,第一旋转电机、第二旋转电机均通过导线与智能控制器相连,第一传动机构、第二传动机构对称分布,第一旋转电机、第二旋转电机的旋转方向相反。本发明能实现任意角度的搓扭及对光纤的不同搓扭圈数,快速切换搓扭方向,拉制的光纤的PMD稳定控制在0
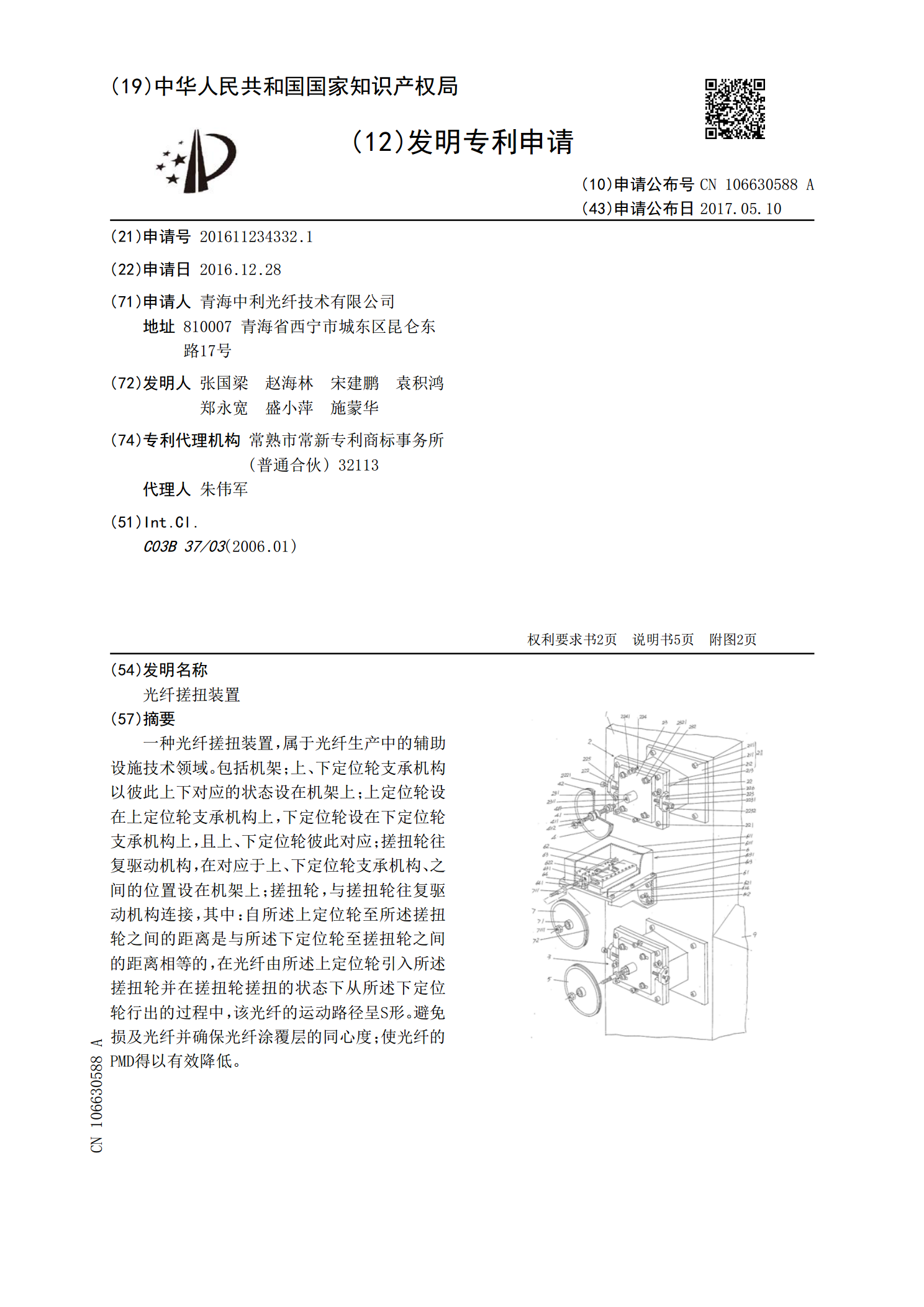
光纤搓扭装置.pdf
一种光纤搓扭装置,属于光纤生产中的辅助设施技术领域。包括机架;上、下定位轮支承机构以彼此上下对应的状态设在机架上;上定位轮设在上定位轮支承机构上,下定位轮设在下定位轮支承机构上,且上、下定位轮彼此对应;搓扭轮往复驱动机构,在对应于上、下定位轮支承机构、之间的位置设在机架上;搓扭轮,与搓扭轮往复驱动机构连接,其中:自所述上定位轮至所述搓扭轮之间的距离是与所述下定位轮至搓扭轮之间的距离相等的,在光纤由所述上定位轮引入所述搓扭轮并在搓扭轮搓扭的状态下从所述下定位轮行出的过程中,该光纤的运动路径呈S形。避免损及光

光纤搓扭装置以及方法.pdf
本申请公开了光纤搓扭装置以及方法,其中装置包括:安装座;伺服电机,设置在安装座上;U型架,U型架包括两个安装臂以及连接两个安装臂的连接部,连接部与输出轴相对固定;转动轴,安装在安装臂上,转动轴轴线与输出轴轴线垂直相交;搓扭轮,外套在转动轴上,搓扭轮的外侧壁具有环状的V型槽。本申请当伺服电机运行时,搓扭轮随着输出轴作正反转运动,即搓扭轮左右摆动。搓扭轮倾斜一定的角度后,光纤与V型槽的槽底相切转变为光纤与V型槽的斜面相切,依靠V型槽斜面与光纤产生摩擦力,在光纤快速的生产过程中产生一定的横向搓扭速度,光纤按照搓
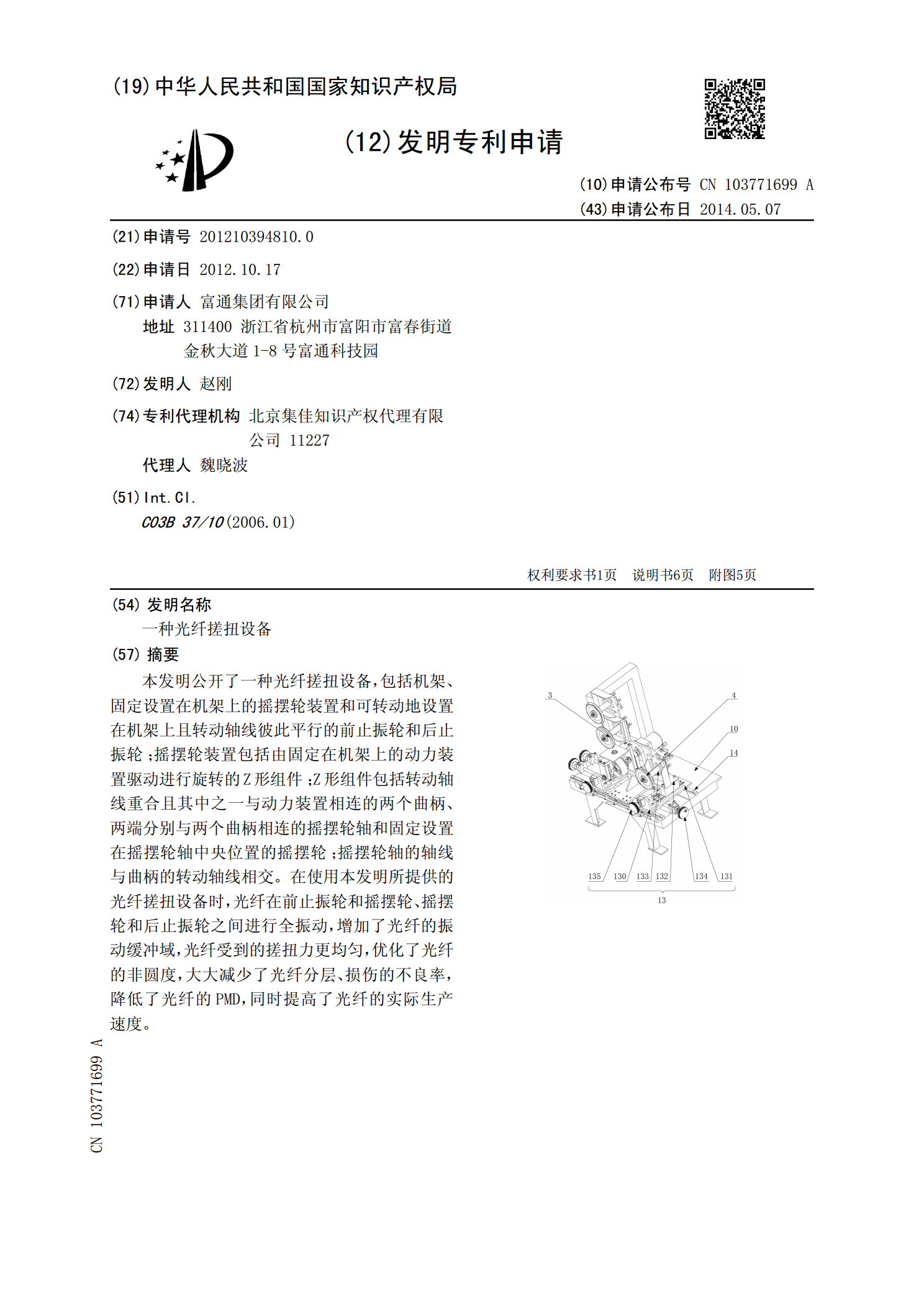
一种光纤搓扭设备.pdf
本发明公开了一种光纤搓扭设备,包括机架、固定设置在机架上的摇摆轮装置和可转动地设置在机架上且转动轴线彼此平行的前止振轮和后止振轮;摇摆轮装置包括由固定在机架上的动力装置驱动进行旋转的Z形组件;Z形组件包括转动轴线重合且其中之一与动力装置相连的两个曲柄、两端分别与两个曲柄相连的摇摆轮轴和固定设置在摇摆轮轴中央位置的摇摆轮;摇摆轮轴的轴线与曲柄的转动轴线相交。在使用本发明所提供的光纤搓扭设备时,光纤在前止振轮和摇摆轮、摇摆轮和后止振轮之间进行全振动,增加了光纤的振动缓冲域,光纤受到的搓扭力更均匀,优化了光纤的
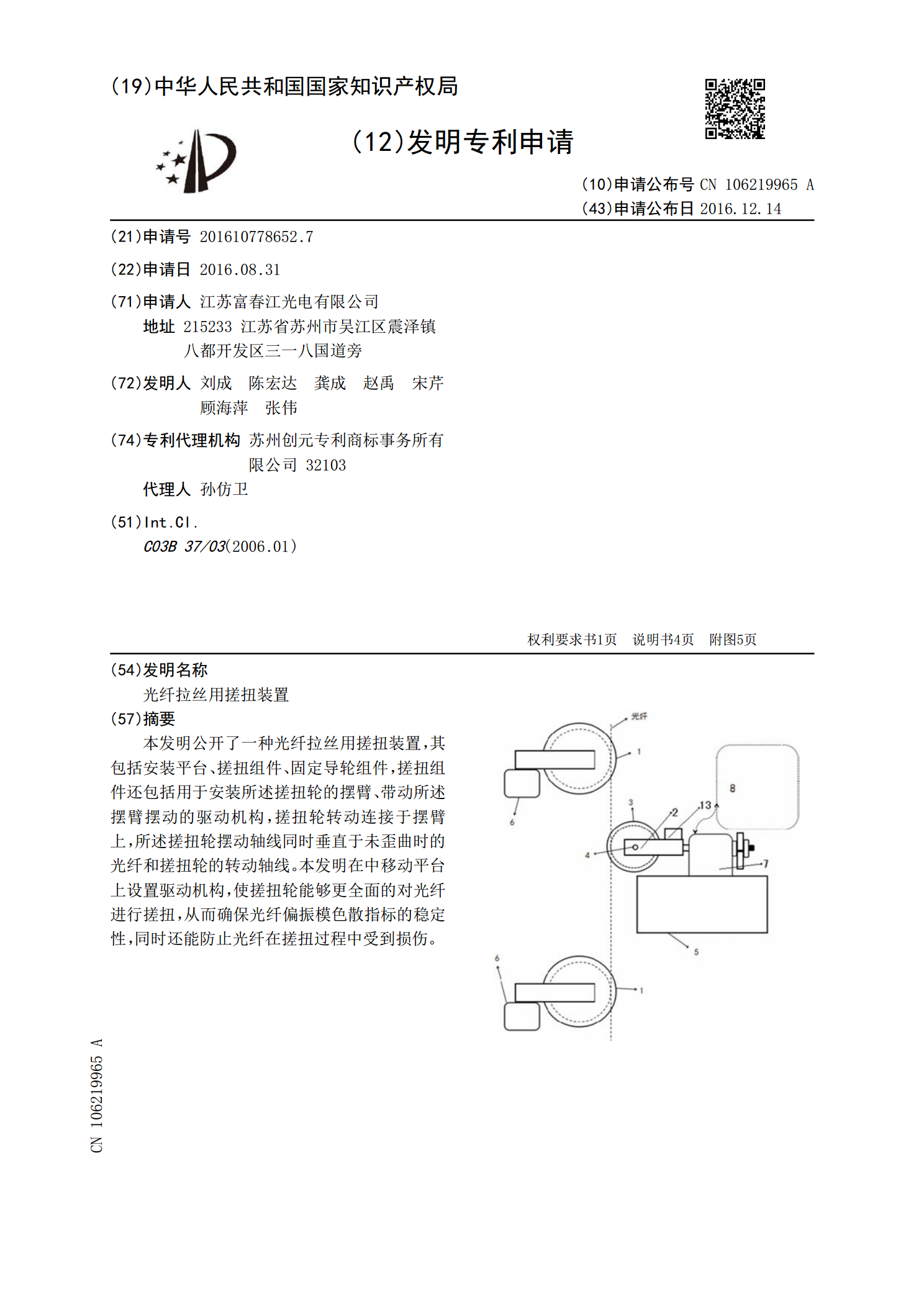
光纤拉丝用搓扭装置.pdf
本发明公开了一种光纤拉丝用搓扭装置,其包括安装平台、搓扭组件、固定导轮组件,搓扭组件还包括用于安装所述搓扭轮的摆臂、带动所述摆臂摆动的驱动机构,搓扭轮转动连接于摆臂上,所述搓扭轮摆动轴线同时垂直于未歪曲时的光纤和搓扭轮的转动轴线。本发明在中移动平台上设置驱动机构,使搓扭轮能够更全面的对光纤进行搓扭,从而确保光纤偏振模色散指标的稳定性,同时还能防止光纤在搓扭过程中受到损伤。