
激光陀螺惯性测量单元系统级标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

激光陀螺惯性测量单元系统级标定方法.docx
激光陀螺惯性测量单元系统级标定方法激光陀螺惯性测量单元(InertialMeasurementUnit,IMU)是一种用于测量物体的姿态和角速度的装置。它由加速度计和陀螺仪组成,通过测量物体的加速度和角速度来推导出物体的姿态和运动状态。然而,由于加速度计和陀螺仪的误差以及系统噪声等因素的存在,IMU系统在实际应用中往往需要进行标定,以提高测量精度和准确性。本文将介绍一种基于系统级标定方法的激光陀螺IMU系统级标定方法,该方法不仅考虑了加速度计和陀螺仪的误差校准,还考虑了激光陀螺本身的误差,从而进一步提高I

一种激光陀螺捷联惯性导航系统级标定方法.pptx
,目录PartOnePartTwo标定目的和意义标定方法分类和比较系统级标定方法流程PartThree系统组成和工作原理激光陀螺仪的工作原理和特点系统误差来源和影响PartFour实验设备与器材实验步骤和操作流程数据采集和处理方法PartFive数据处理流程和方法误差分析和模型建立标定结果评估和优化PartSix实际应用案例和效果方法局限性和改进方向技术发展趋势和展望THANKS

一种激光陀螺捷联惯性导航系统级标定方法.docx
一种激光陀螺捷联惯性导航系统级标定方法标题:一种激光陀螺捷联惯性导航系统级标定方法摘要:激光陀螺捷联惯性导航系统是一种重要的导航设备,具有精确的角速度测量能力。然而,由于其本身的误差和外界环境的干扰,导航系统的性能可能会下降。因此,对激光陀螺捷联惯性导航系统进行精确的水平标定是至关重要的。本文提出了一种激光陀螺捷联惯性导航系统级标定方法,通过校正陀螺仪和加速度计的误差,提高导航系统的定位精度和稳定性。关键词:激光陀螺,捷联惯性导航,标定方法,误差校正,定位精度引言:激光陀螺捷联惯性导航系统广泛应用于航空航
一种惯性测量单元标定方法.pdf
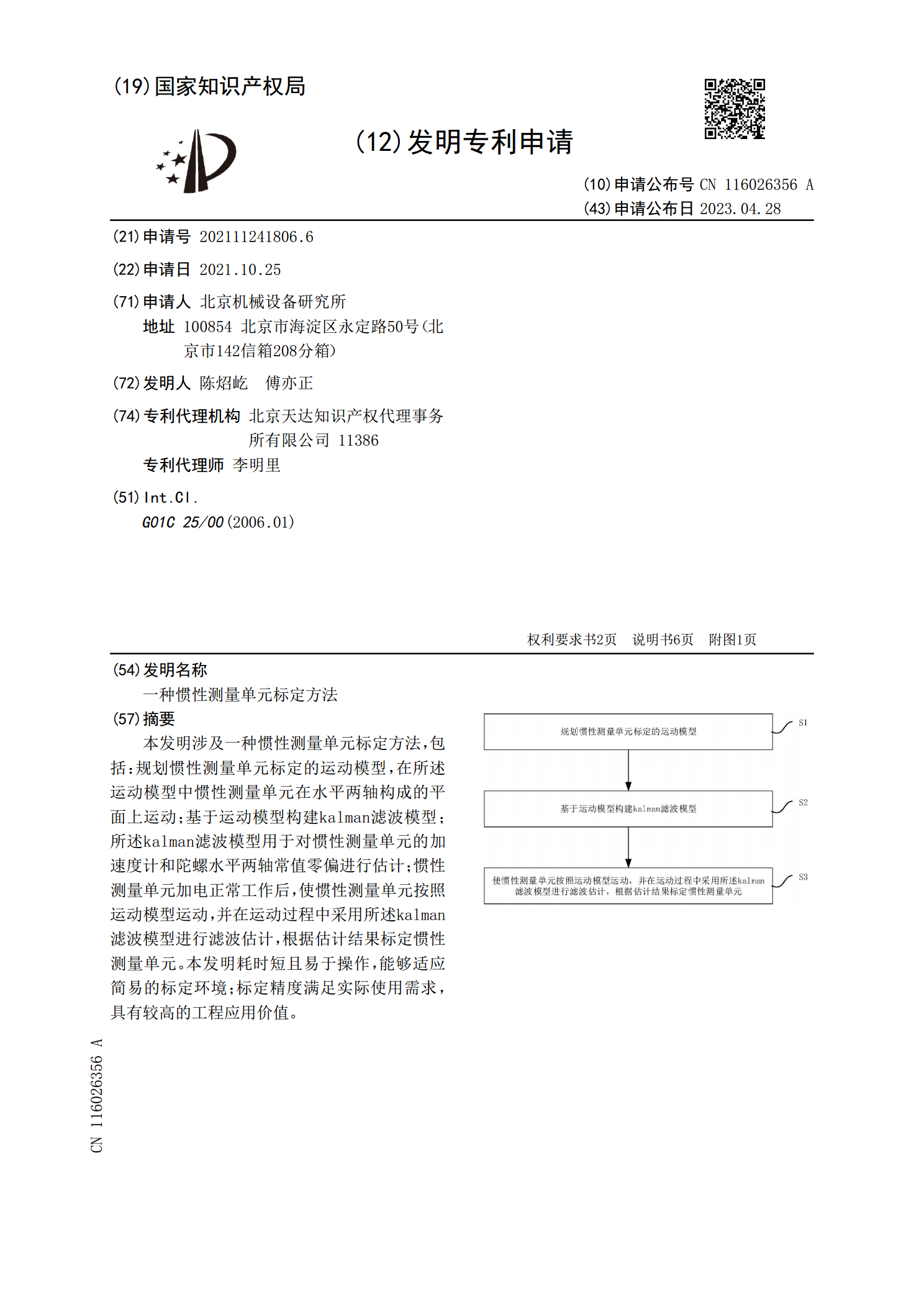
本发明涉及一种惯性测量单元标定方法,包括:规划惯性测量单元标定的运动模型,在所述运动模型中惯性测量单元在水平两轴构成的平面上运动;基于运动模型构建kalman滤波模型;所述kalman滤波模型用于对惯性测量单元的加速度计和陀螺水平两轴常值零偏进行估计;惯性测量单元加电正常工作后,使惯性测量单元按照运动模型运动,并在运动过程中采用所述kalman滤波模型进行滤波估计,根据估计结果标定惯性测量单元。本发明耗时短且易于操作,能够适应简易的标定环境;标定精度满足实际使用需求,具有较高的工程应用价值。

激光陀螺捷联惯导系统的误差参数标定方法.docx
激光陀螺捷联惯导系统的误差参数标定方法激光陀螺捷联惯导系统(LaserGyroInertialNavigationSystem,LGINS)是一种先进的惯性导航系统,它通过激光陀螺仪来测量角速度,并通过加速度计测量加速度,从而实现全姿态的导航能力。然而,由于各种因素的影响,LGINS系统中的误差会导致导航精度的下降。因此,误差参数标定方法对于提高LGINS系统的导航精度至关重要。误差参数标定方法是通过对LGINS系统中各种误差源进行准确的建模和标定,从而进行误差补偿或校正的过程。常见的误差源包括陀螺仪的零