
肘关节功能康复装置.pdf

长春****主a


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

肘关节功能康复装置.pdf
本发明公开了一种肘关节功能康复装置,其特征在于包括肘关节衬套、上臂骨定位板、前臂骨定位板、铰轴、康复驱动装置和销轴,康复驱动装置包括驱动箱、控制系统、伺服电机、PLC控制器、驱动杆、驱动丝套、主动伞齿轮和从动伞齿轮,肘关节衬套上半部外部圆周固定有上臂骨定位板,下半部外部圆周固定有前臂骨定位板,驱动箱下端两侧分别经铰轴与前臂骨定位板相铰接,驱动箱内设有伺服电机,伺服电机输出轴端设有主动伞齿轮,驱动杆一端与驱动箱相连接,另一端经与驱动丝套螺纹连接,驱动箱内的驱动杆与从动伞齿轮相固定连接,驱动丝套经销轴与上臂骨

肘关节的康复功能练(通用).doc
北京大学第三医院康复医学中心肘关节的康复功能练习(请仔细阅读本计划后再进行练习,开始新一阶段练习最好在复查后并经医生许可后再予进行)注意事项:1.本计划所提供的方法及数据均按照一般常规情况制定,具体执行中需视自身条件及手术情况不同,在医生指导下完成。2.功能练习中存在的疼痛,是不可避免的。如疼痛在练习停止半小时内可消退至原水平,则不会对组织造成损伤,应予以耐受。3.肌力练习应集中练习至肌肉有酸胀疲劳感,充分休息后再进行下一组。练习次数、时间、负荷等必须根据要求完成,尤其不宜为完成更多次数而增加休息时间,否

肘关节功能障碍的康复护理效果.doc
肘关节功能障碍的康复护理效果发表时间:2011-1-2112:13:09来源:创新医学网医学编辑部推荐作者:梁丽华作者单位:045000,山西省阳泉煤业(集团)有限责任公司总医院。【摘要】[目的]观察肘关节功能障碍康复护理的效果。[方法]对30例肘关节功能障碍病人实施综合康复训练和护理(康复组),并和单纯靠自己及家属进行功能训练的30例进行比较(对照组)。[结果]肘关节功能按Mayo评分标准进行评定,康复组疗效明显优于对照组,无并发症发生。[结论]科学的功能训练及有针对性的护理,是恢复肘关节良好功能的重要
辅助肘关节运动的康复装置及康复系统.pdf
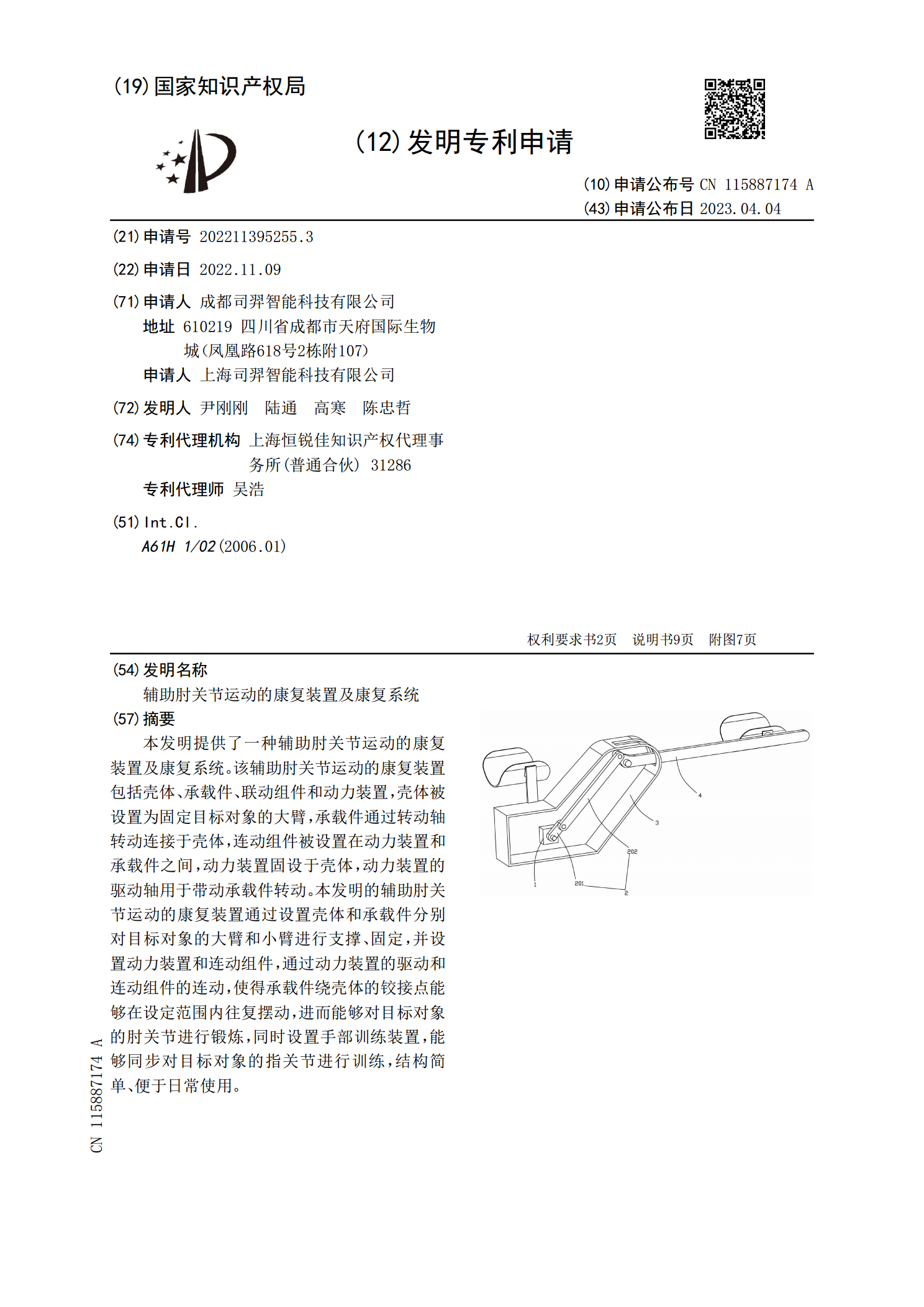
本发明提供了一种辅助肘关节运动的康复装置及康复系统。该辅助肘关节运动的康复装置包括壳体、承载件、联动组件和动力装置,壳体被设置为固定目标对象的大臂,承载件通过转动轴转动连接于壳体,连动组件被设置在动力装置和承载件之间,动力装置固设于壳体,动力装置的驱动轴用于带动承载件转动。本发明的辅助肘关节运动的康复装置通过设置壳体和承载件分别对目标对象的大臂和小臂进行支撑、固定,并设置动力装置和连动组件,通过动力装置的驱动和连动组件的连动,使得承载件绕壳体的铰接点能够在设定范围内往复摆动,进而能够对目标对象的肘关节进行

肘关节固定器在骨折后肘关节功能障碍康复中的应用.docx
肘关节固定器在骨折后肘关节功能障碍康复中的应用[摘要]目的:探讨肘关节固定器在骨折后肘关节功能障碍康复中的效果。方法:选择我院2008年10月~2010年12月收治的肘关节骨折患者42例随机分为固定器组(21例)和对照组(21例)对照组患者给予关节松动和关节活动训练固定器组在对照组的基础上加肘关节固定器。康复治疗2个月后评定两组治疗效果。结果:治疗后两组患者疼痛、稳定性、肘关节活动范围、日常生活能力均有所改善治疗后固定器组肘关节活动范围及日常生活能力[(19.2±1.2)、