
小车倒立摆起摆的控制算法的研究与仿真实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

小车倒立摆起摆的控制算法的研究与仿真实现.docx
小车倒立摆起摆的控制算法的研究与仿真实现摘要:小车倒立摆起摆是现代控制领域中的一个经典问题,研究小车倒立摆起摆控制算法不仅具有理论意义,也有广泛的实际应用价值。本文主要介绍了小车倒立摆起摆控制算法的研究以及仿真实现,分别从理论分析、控制系统设计、仿真模型等方面进行了阐述。关键词:小车倒立摆;控制算法;仿真实现一、引言小车倒立摆是现代控制领域中的一个经典问题,它是非线性、强耦合、时变的动力学系统。研究小车倒立摆起摆控制算法可以解决很多实际问题,如自动驾驶车辆、机器人姿态控制等。因此,小车倒立摆的研究一直备受

倒立摆系统自动摆起控制的研究的任务书.docx
倒立摆系统自动摆起控制的研究的任务书任务书研究题目:倒立摆系统自动摆起控制的研究摘要:倒立摆系统已经成为了控制理论中经典的例子,因为其未线性和非线性的特点,它是一个十分复杂的控制对象。在实际控制中,倒立摆系统的控制可以作为机器人控制、自适应控制、智能控制等领域的理论基础和应用平台。本研究将以倒立摆系统为研究对象,探讨如何通过自动控制手段,实现对倒立摆系统的高效控制。一、研究目的和意义随着自动化技术应用越来越广泛,控制系统的实现和优化已成为当前科研领域的热点之一。倒立摆系统作为高度非线性控制系统,是控制算法

学习控制算法设计及倒立摆控制实现.docx
学习控制算法设计及倒立摆控制实现控制算法设计及倒立摆控制实现摘要:倒立摆是一个经典的控制问题,其在机器人控制和自动化领域有着重要的应用。本文主要介绍了控制算法设计及倒立摆控制实现的基本原理和方法。首先,我们介绍了倒立摆的基本结构和相关理论背景。然后,我们讨论了控制算法设计的一般步骤和方法,包括建立系统模型、设计控制器、调节控制参数等内容。接着,我们详细介绍了倒立摆控制的实现步骤,包括传感器采集数据、控制器运算、执行器控制等。最后,我们通过实验验证了所设计的控制算法在倒立摆控制上的有效性和稳定性。关键词:控

倒立摆系统稳摆控制算法研究.docx
倒立摆系统稳摆控制算法研究倒立摆系统稳摆控制算法研究倒立摆系统是一种经典的非线性动力学系统,其主要应用于机器人控制、智能交通系统、飞行器等领域。在掌握倒立摆系统的基础上,深入研究它的控制算法,可以使我们更好地应用它来解决实际问题。1.倒立摆系统简介倒立摆系统由一个竖直支柱、一个可以绕支柱转动的摆臂和一个在摆臂末端悬挂的质点组成。摆臂和质点的运动受到支柱的约束,同时受到重力和惯性力的作用。当系统处于平衡状态时,摆臂竖直向上,质点在摆臂端点正下方。2.控制算法分析2.1比例积分控制算法比例积分控制算法是一种基
倒立摆的LQR控制器算法的设计与仿真.pdf
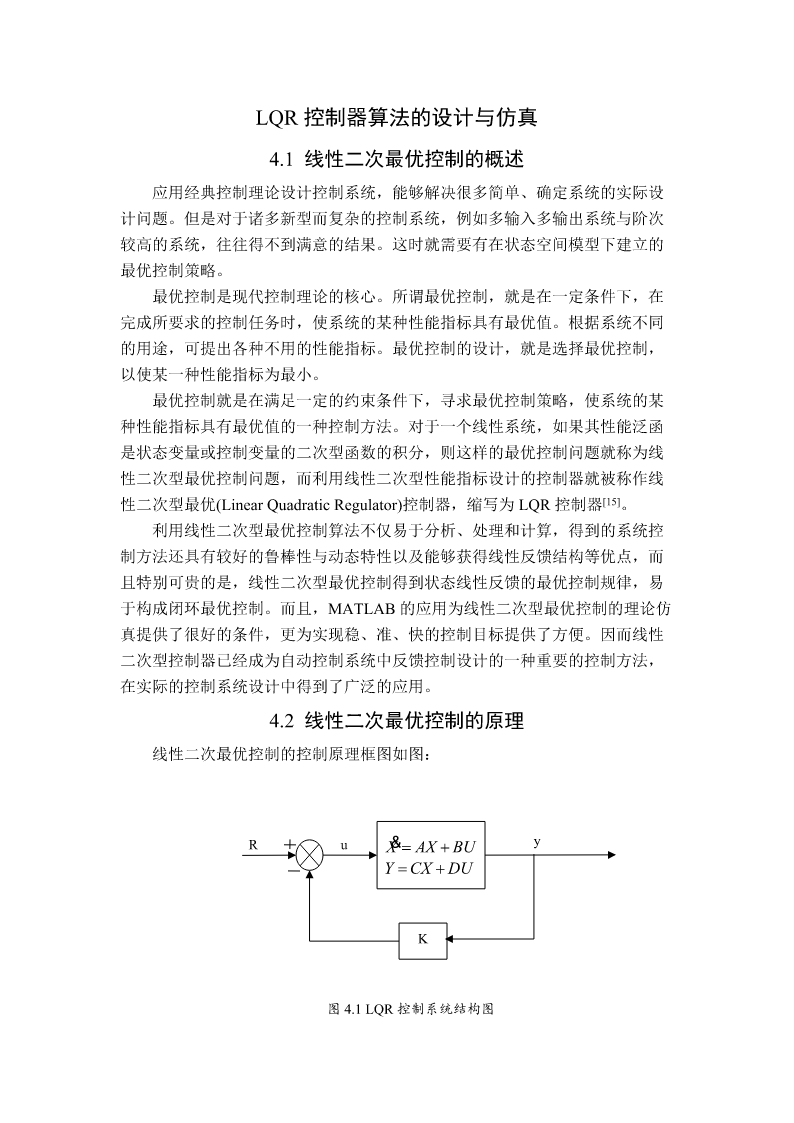
LQR控制器算法的设计与仿真4.1线性二次最优控制的概述应用经典控制理论设计控制系统,能够解决很多简单、确定系统的实际设计问题。但是对于诸多新型而复杂的控制系统,例如多输入多输出系统与阶次较高的系统,往往得不到满意的结果。这时就需要有在状态空间模型下建立的最优控制策略。最优控制是现代控制理论的核心。所谓最优控制,就是在一定条件下,在完成所要求的控制任务时,使系统的某种性能指标具有最优值。根据系统不同的用途,可提出各种不用的性能指标。最优控制的设计,就是选择最优控制,以使某一种性能指标为最小。最优控制就是在