
基于直接转矩控制原理的电动执行机构.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于直接转矩控制原理的电动执行机构.docx
基于直接转矩控制原理的电动执行机构电动执行机构是控制系统中十分重要的组成部分之一,通过电动执行机构的运动,能够将其输出机械力学能量转化为各种位置、速度、力、力矩等控制信号,以完成对物理系统的控制和操作。在此背景下,利用直接转矩控制原理对电动执行机构实现高效、精确的运动控制在物理系统中非常重要。直接转矩控制原理指的是控制系统通过对电机的输出转矩进行精确控制,实现电动执行机构的位置、速度、力、力矩等运动状态。具体来说,传统的控制方案是通过控制直流电机的电流、电压等信号,来间接控制输出力矩。而直接转矩控制方案则
阀门电动执行机构电子力矩转矩控制机构.pdf
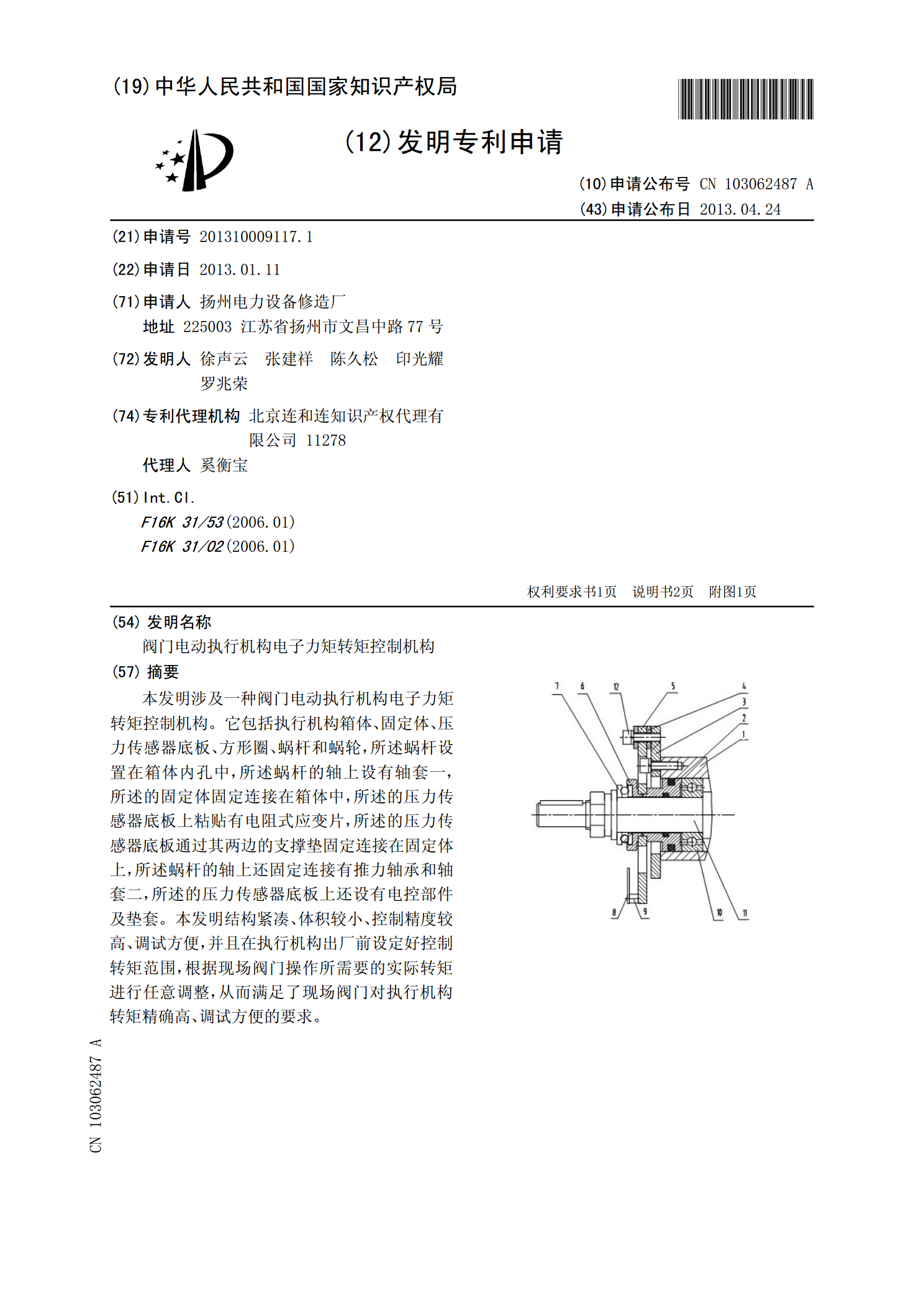
本发明涉及一种阀门电动执行机构电子力矩转矩控制机构。它包括执行机构箱体、固定体、压力传感器底板、方形圈、蜗杆和蜗轮,所述蜗杆设置在箱体内孔中,所述蜗杆的轴上设有轴套一,所述的固定体固定连接在箱体中,所述的压力传感器底板上粘贴有电阻式应变片,所述的压力传感器底板通过其两边的支撑垫固定连接在固定体上,所述蜗杆的轴上还固定连接有推力轴承和轴套二,所述的压力传感器底板上还设有电控部件及垫套。本发明结构紧凑、体积较小、控制精度较高、调试方便,并且在执行机构出厂前设定好控制转矩范围,根据现场阀门操作所需要的实际转矩进

具有调整转矩控制装置的阀门电动执行机构.pdf
本发明涉及一种阀门电动执行机构用可调整转矩控制装置,该可调整转矩控制装置包括与执行机构固定的支板,支板上设置有输出转轴以及微动开关,转轴上活动连接有紧固件以及凸轮片,紧固件上弹性连接有调节轴,调节轴上向凸轮片方向延伸有一驱动销,所述凸轮片上与驱动销对应处开设有导向槽,所述微动开关的滚轮与凸轮片的凸轮面相依。本发明紧凑、体积较小、控制精度较高,并且在由执行机构厂家设定好了的最大输出转矩范围内,根据现场阀门操作所需要的实际转矩进行有级调整,从而满足了现场阀门对执行机构提出的精确转矩控制和保护要求。
基于RBF控制的开关磁阻电动机直接转矩控制.pdf

基于SVPWM的电动汽车直接转矩控制方法研究.docx
基于SVPWM的电动汽车直接转矩控制方法研究摘要:本文研究了基于SVPWM的电动汽车直接转矩控制方法。首先介绍了电动汽车的发展现状和直接转矩控制方法的优点。然后详细介绍了SVPWM的基本原理和实现方式。接着,描述了基于SVPWM的电动汽车直接转矩控制方法的整体框架和实现步骤,并进行了仿真实验验证了该方法的有效性。最后,分析了该方法存在的问题和未来的研究方向。关键词:电动汽车,直接转矩控制,SVPWM,仿真实验一、引言近年来,随着环保意识的不断提高和石油价格的不断攀升,电动汽车的发展受到越来越多的关注。电动