
多无人水下航行器协同导航与定位研究(英文).docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多无人水下航行器协同导航与定位研究(英文).docx
多无人水下航行器协同导航与定位研究(英文)Title:CollaborativeNavigationandLocalizationofAutonomousUnderwaterVehiclesAbstract:Autonomousunderwatervehicles(AUVs)arewidelyusedforvariousapplications,includingoceanographicresearch,environmentalmonitoring,andresourceexploration.The

无人水下航行器SINSDVL组合导航方法研究.docx
无人水下航行器SINSDVL组合导航方法研究摘要:随着水下航行器广泛应用,对于其导航精度的要求越来越高,而传统的GNSS导航在水下的精度较差,因此需要寻求新的导航解决方式。本文研究了一种基于SINSDVL组合的水下航行器导航方法,利用声纳进行距离和速度的测量,并通过惯性导航仪进行位置和姿态的估计,最后通过SINSDVL组合获得更为精准的导航结果。实验结果表明,该方法不仅可以有效提高水下航行器的导航精度,而且具有较强的适应性和应用价值。关键词:水下航行器;SINSDVL组合导航;声纳测距;惯性导航;导航精度

水下航行器组合导航定位系统设计研究.docx
水下航行器组合导航定位系统设计研究摘要:水下航行器(UnmannedUnderwaterVehicle,UUV)是一种能进行水下任务而无需潜水员直接操作的机器人。在海洋探测、水下勘探、水下作业等领域有着广泛的应用。组合导航定位系统作为水下航行器的核心技术之一,能够提高其定位精度和系统可靠性。本文介绍了组合导航定位系统的工作原理、包括多传感器融合的算法,最后根据实验结果验证了组合导航定位系统对水下航行器的提升。(120字)关键词:水下航行器,组合导航,融合算法,定位精度,可靠性一、引言水下航行器是一种能够在
水下无人航行器主动对接装置及水下无人航行器.pdf
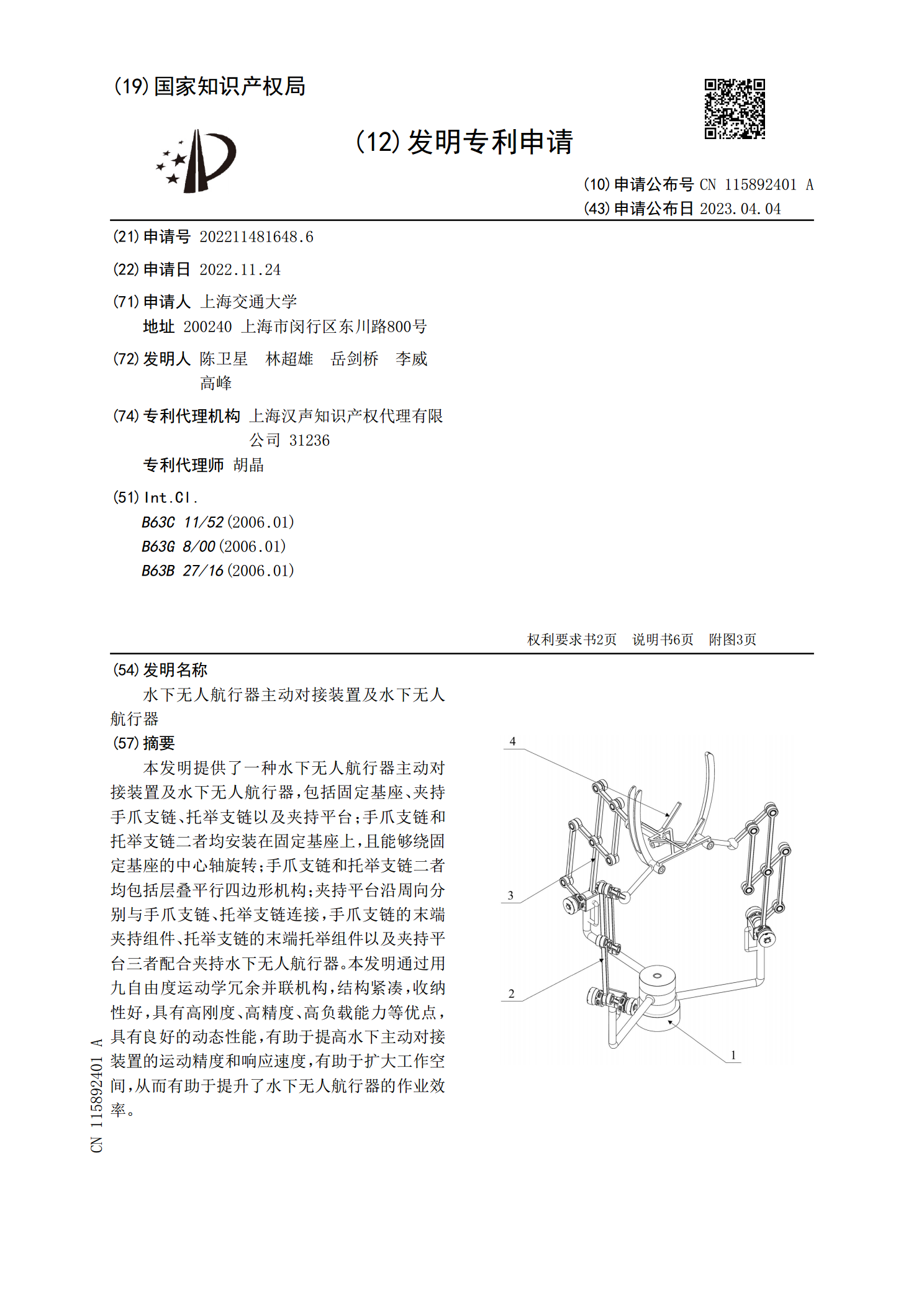
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动

基于单信标的无人水下航行器导航算法及改进.docx
基于单信标的无人水下航行器导航算法及改进基于单信标的无人水下航行器导航算法及改进摘要:随着科技的发展和需求的增加,无人水下航行器(UnmannedUnderwaterVehicle,UUV)在海洋资源勘探、水下环境监测、海洋科学研究等领域得到广泛应用。而水下环境的特殊性使得无人水下航行器的导航变得更加复杂。本文基于单信标提出了一种改进的无人水下航行器导航算法,通过实验证明了该算法在提高导航精度和鲁棒性方面的有效性。关键词:无人水下航行器、导航算法、单信标、精度、鲁棒性1.引言无人水下航行器能够在水下环境进