
基于虚拟仪器技术的海上实时自动调平系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于虚拟仪器技术的海上实时自动调平系统设计.docx
基于虚拟仪器技术的海上实时自动调平系统设计摘要海上平台稳定性一直是一个关键问题,与船体设计、驾驶技能、气象和海况等多种因素相关。本文介绍了一种基于虚拟仪器技术的海上实时自动调平系统。该系统通过测量平台的倾斜角度和加速度,利用PID控制算法自动调整平台的水平位置。设计和实现表明,该系统能够有效地提高平台的稳定性和可靠性,同时极大地减少了人工干预和作业难度。关键词:虚拟仪器技术,海上平台稳定性,自动调平系统,PID控制算法1.引言海上平台是一种特殊的工程结构,需要在动荡的海上环境中运行。平台的安全性和可靠性对
实时自动调平桌椅.pdf
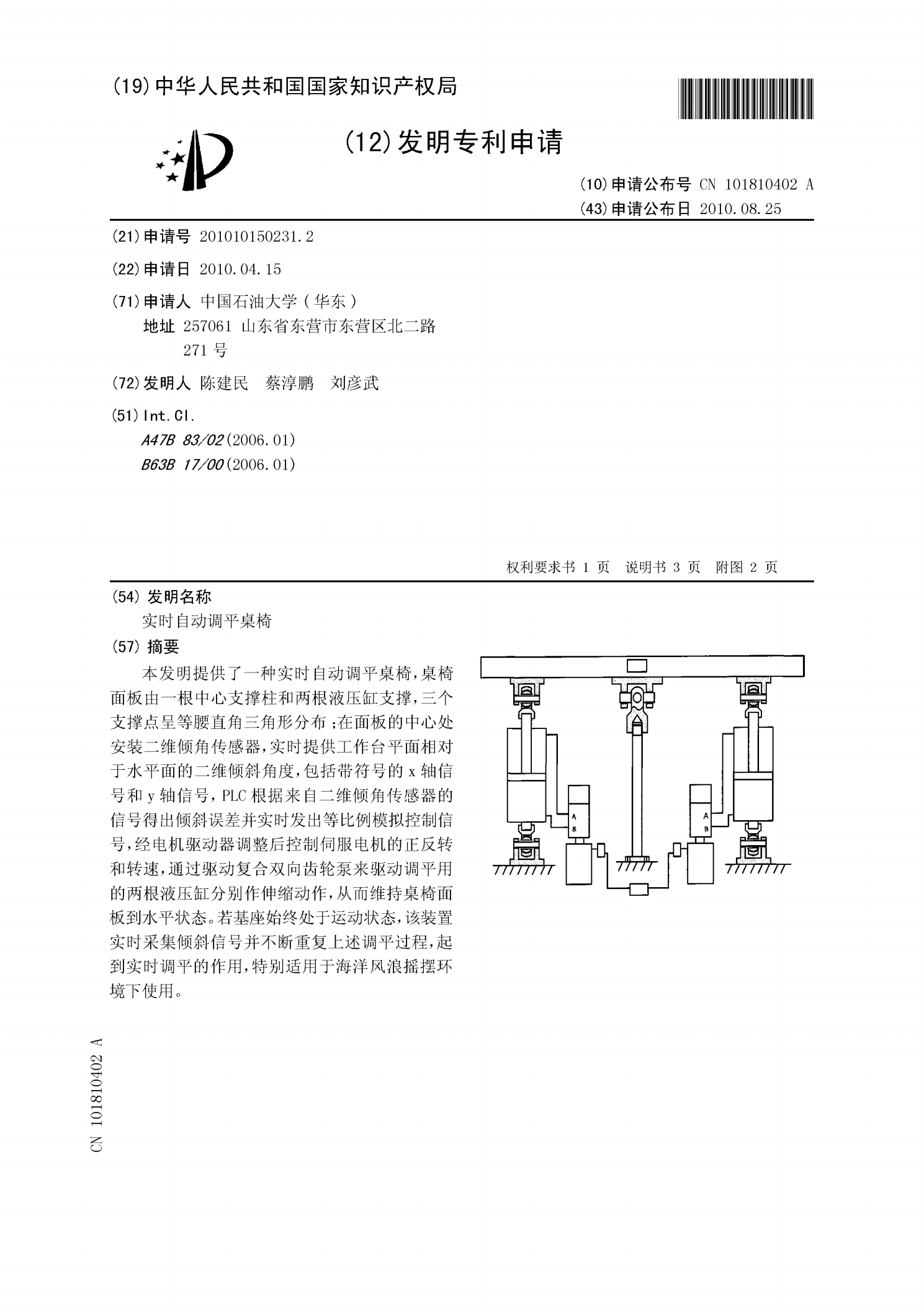
本发明提供了一种实时自动调平桌椅,桌椅面板由一根中心支撑柱和两根液压缸支撑,三个支撑点呈等腰直角三角形分布;在面板的中心处安装二维倾角传感器,实时提供工作台平面相对于水平面的二维倾斜角度,包括带符号的x轴信号和y轴信号,PLC根据来自二维倾角传感器的信号得出倾斜误差并实时发出等比例模拟控制信号,经电机驱动器调整后控制伺服电机的正反转和转速,通过驱动复合双向齿轮泵来驱动调平用的两根液压缸分别作伸缩动作,从而维持桌椅面板到水平状态。若基座始终处于运动状态,该装置实时采集倾斜信号并不断重复上述调平过程,起到实时

基于PLC的机电式自动调平系统.docx
基于PLC的机电式自动调平系统随着现代制造技术的普及和机械化程度的不断提高,越来越多的厂家开始使用机电式自动调平系统来提高生产效率和节省人力成本。在这种系统中,PLC就是最重要的核心部分,它可以对机械控制系统进行智能化的控制和监控,实现高效、精准的生产控制。本文将详细讨论基于PLC的机电式自动调平系统的原理、功能以及优点,以及如何使用PLC来实现自动调平的过程。一、机电式自动调平系统的原理和功能机电式自动调平系统是利用PLC进行智能控制的一种设备,它主要由机电结构、传感器设备、控制系统和人机界面等组成。它

基于虚拟仪器技术的实时温度测控系统构建.docx
基于虚拟仪器技术的实时温度测控系统构建AbstractWiththedevelopmentofvirtualinstrumenttechnology,thereal-timetemperaturemeasurementandcontrolsystembasedonvirtualinstrumenttechnologyhavebecomemoreconciseandaccurate.Inthispaper,wepresentadesignandimplementationofareal-timetemper

基于PLC的自动调平控制系统研制.docx
基于PLC的自动调平控制系统研制摘要:本文探讨了基于PLC的自动调平控制系统的研制。首先介绍了该控制系统的概念和组成部分,然后对其工作原理进行了详细阐述。接着,介绍了该系统的应用领域和优势,并提出了相应的发展方向。最后,对该控制系统的性能进行了评估,并提出了未来改进的建议。关键词:PLC;自动调平控制;控制系统;工作原理;应用领域一、引言自动化技术的快速发展和广泛应用使得许多传统工业领域都得到了普及和推广。作为自动化技术的重要组成部分,控制系统在工业自动化过程中发挥着至关重要的作用。在许多领域,机械设备需