
基于时空域融合滤波的弱小运动目标检测算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于时空域融合滤波的弱小运动目标检测算法.docx
基于时空域融合滤波的弱小运动目标检测算法随着科技的不断进步和人类对于无人机、无人车等智能系统的需求增加,弱小运动目标的检测变得越来越重要。在实际应用场景中,弱小运动目标检测面临着许多困难,例如光照条件不好、目标的运动速度过快等。本文提出了一种基于时空域融合滤波的弱小运动目标检测算法。该算法结合了时域和空域两方面的信息,有效提高了目标检测的精度和可靠性。以下将从算法原理、实验结果等方面详细介绍本文提出的算法。一、算法原理在传统的弱小目标检测算法中,通常采用背景建模的方法。但是这种方法存在许多缺陷,如对于光照
基于时空域特征融合的红外弱小目标的检测方法及装置.pdf
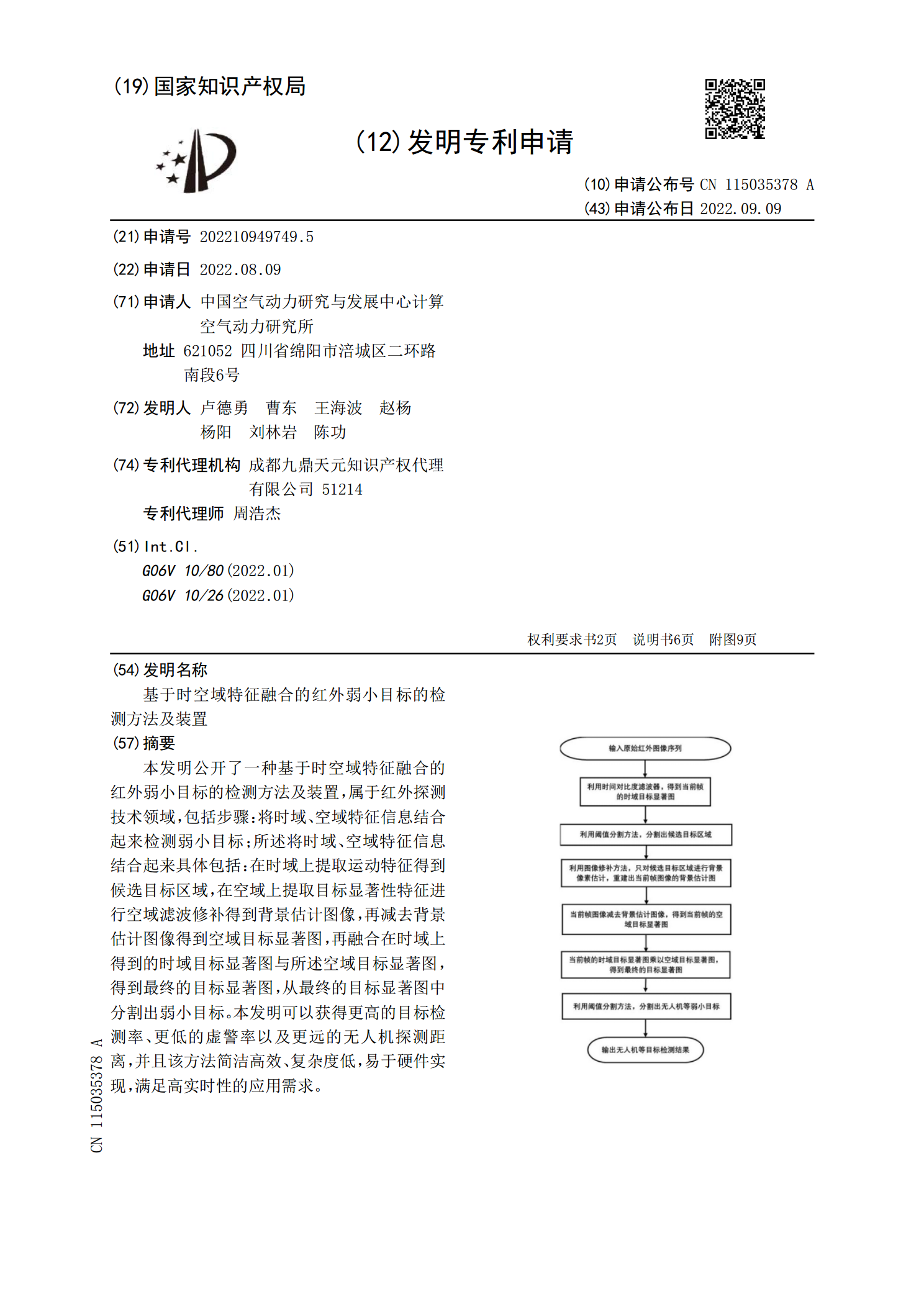
本发明公开了一种基于时空域特征融合的红外弱小目标的检测方法及装置,属于红外探测技术领域,包括步骤:将时域、空域特征信息结合起来检测弱小目标;所述将时域、空域特征信息结合起来具体包括:在时域上提取运动特征得到候选目标区域,在空域上提取目标显著性特征进行空域滤波修补得到背景估计图像,再减去背景估计图像得到空域目标显著图,再融合在时域上得到的时域目标显著图与所述空域目标显著图,得到最终的目标显著图,从最终的目标显著图中分割出弱小目标。本发明可以获得更高的目标检测率、更低的虚警率以及更远的无人机探测距离,并且该方

基于时空域与频域融合的农村变电站中运动目标检测算法.docx
基于时空域与频域融合的农村变电站中运动目标检测算法基于时空域与频域融合的农村变电站中运动目标检测算法摘要:本文提出了一种基于时空域与频域融合的农村变电站中运动目标检测算法,该算法通过对视频序列的时空特性分析,结合频域特征进行目标检测。该算法通过对动态背景下的运动目标进行准确的检测,实现了对农村变电站中场景的有效分析。关键词:时空域、频域、农村变电站、运动目标检测一、问题背景随着社会的发展和人们生活水平的提高,电力的需求量逐年增加。为了满足日益增长的用电需求,电网建设规模不断扩大,变电站也随之增多。农村变电

基于粒子滤波的红外弱小目标的检测前跟踪算法的开题报告.docx
基于粒子滤波的红外弱小目标的检测前跟踪算法的开题报告一、问题描述红外弱小目标检测是目前红外图像处理中的一项重要研究工作。准确快速地检测红外图像中的弱小目标一直是红外图像处理领域的一个难点问题。特别是在工程应用中,如红外目标跟踪、制导、监视等领域,要求检测速度快,准确度高,并具有良好的鲁棒性。因此,如何建立高效准确的红外弱小目标检测算法是当前红外图像技术研究的热点之一。在目标跟踪中,为了能够实时追踪目标,需要对目标进行跟踪前的预处理。在红外图像中,由于噪声影响以及图像亮度变化等因素的影响,通常需要对目标进行

基于改进粒子滤波的红外弱小目标检测前跟踪算法的任务书.docx
基于改进粒子滤波的红外弱小目标检测前跟踪算法的任务书任务书任务名称:基于改进粒子滤波的红外弱小目标检测前跟踪算法研究任务描述:本任务的主要目的是研究基于改进粒子滤波的红外弱小目标检测前跟踪算法,解决红外弱小目标检测中存在的前景与背景杂波、运动模糊、低对比度等问题,从而实现对红外弱小目标的精确识别和跟踪。任务目标:1.研究红外弱小目标检测前跟踪算法的基本原理和流程,分析其存在的问题和不足。2.针对红外弱小目标检测中存在的前景与背景杂波、运动模糊、低对比度等问题,优化算法的相关参数,提高算法的准确度和稳定性。