
基于微多普勒的微动点目标参数估计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于微多普勒的微动点目标参数估计.docx
基于微多普勒的微动点目标参数估计引言:雷达是一种广泛应用于目标检测、跟踪和识别的无线电设备。作为一种主要的侦测手段,雷达的应用范围逐渐拓展,越来越多的应用领域需要雷达技术的支持。在雷达目标多普勒参数估计中,微多普勒现象是非常重要的一个研究内容。本文将从目标多普勒参数估计的基本理论讲起,接着介绍微动点的概念、微多普勒现象的基本特点以及参数估计的方法。一、目标多普勒参数估计基本理论雷达目标多普勒参数通常包括雷达目标的速度、加速度和角速度等信息。在雷达工作时,探测到目标返回的雷达信号中会包含以上信息,由此可以通
基于微多普勒效应的微动目标特征提取方法.pdf
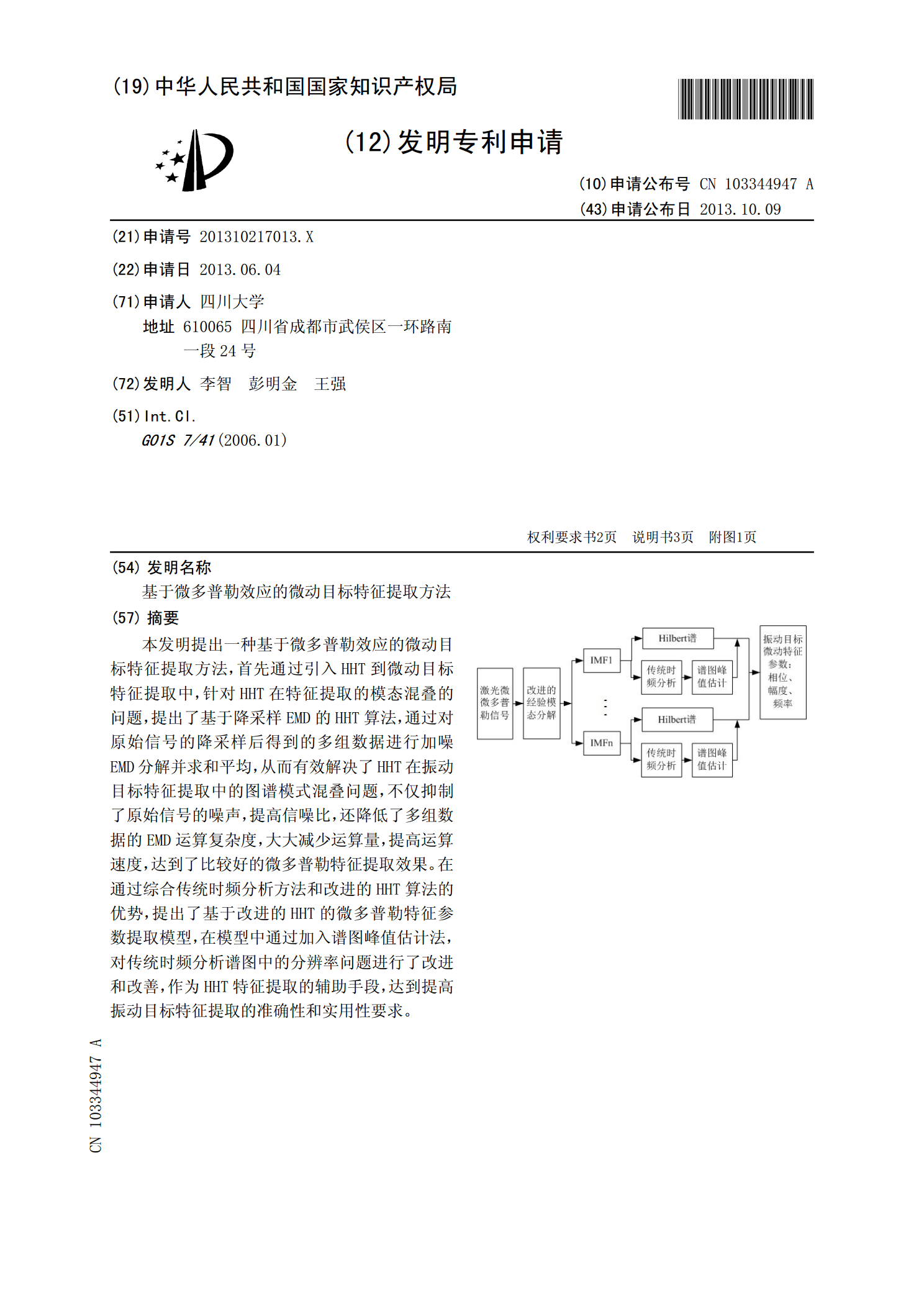
本发明提出一种基于微多普勒效应的微动目标特征提取方法,首先通过引入HHT到微动目标特征提取中,针对HHT在特征提取的模态混叠的问题,提出了基于降采样EMD的HHT算法,通过对原始信号的降采样后得到的多组数据进行加噪EMD分解并求和平均,从而有效解决了HHT在振动目标特征提取中的图谱模式混叠问题,不仅抑制了原始信号的噪声,提高信噪比,还降低了多组数据的EMD运算复杂度,大大减少运算量,提高运算速度,达到了比较好的微多普勒特征提取效果。在通过综合传统时频分析方法和改进的HHT算法的优势,提出了基于改进的HHT

基于微多普勒的锥体目标进动和结构参数估计.docx
基于微多普勒的锥体目标进动和结构参数估计基于微多普勒的锥体目标进动和结构参数估计摘要:在弧长段微多普勒目标特征提取领域,锥体目标是一种常见的目标类型。为了精确地估计锥体目标的进动和结构参数,本文提出了一种基于微多普勒的方法。首先,通过微多普勒频谱分析,提取出目标的微多普勒频谱特征。然后,利用最小二乘法,估计目标的进动参数。最后,通过结构参数估计,获取目标的结构信息。实验结果表明,所提出的方法可以准确地估计锥体目标的进动和结构参数,对于弧长段微多普勒目标的分析具有重要的应用价值。关键词:微多普勒,锥体目标,

基于时间-微多普勒谱的进动锥体目标参数估计.docx
基于时间-微多普勒谱的进动锥体目标参数估计时间-微多普勒谱技术是一种广泛应用于目标辨识、目标分类和目标跟踪的信号处理技术。该技术可以通过对雷达回波信号的处理,从中提取出有关目标运动状态的信息并进行参数估计。进动锥体目标是一类高速运动目标,其速度和方向随着时间而改变,因此时间-微多普勒谱技术特别适合用于对进动锥体目标的参数估计。在本文中,我们将介绍时间-微多普勒谱技术的基本原理,并探讨如何利用该技术进行进动锥体目标参数估计。首先,我们将介绍时间-微多普勒谱的定义和基本性质,然后我们将讨论进动锥体目标的运动特

弹道中段目标微多普勒特征及目标参数估计.docx
弹道中段目标微多普勒特征及目标参数估计弹道中段目标微多普勒特征及目标参数估计摘要:弹道导弹在中段飞行过程中是常见的威胁,因此准确地识别和估计弹道中段目标的微多普勒特征和目标参数非常重要。本文探讨了弹道中段目标微多普勒特征的分析方法以及目标参数估计的算法。首先介绍了弹道目标的微多普勒效应和反射特性,然后探讨了微多普勒处理方法,包括离散傅里叶变换(DFT)、快速傅里叶变换(FFT)以及其他常用的变换方法。接着,研究了目标参数估计的方法,包括距离估计、速度估计和角度估计。最后,通过仿真实验验证了所提出方法的有效