
基于显微视觉的宏微双重驱动微动台的自动标定.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于显微视觉的宏微双重驱动微动台的自动标定.docx
基于显微视觉的宏微双重驱动微动台的自动标定摘要:本文提出了一种基于显微视觉的宏微双重驱动微动台的自动标定方法。该方法使用CCD相机进行图像采集,并通过CalTag图像标定算法对参考物体进行标定。在微动台运行过程中,通过显微视觉测量系统获取微动台的位移、速度和加速度信息,并利用得到的标定结果进行位姿校正。实验结果表明,该方法能够实现高精度的微动台标定,且具有较强的鲁棒性和实用性。关键词:显微视觉;微动台;自动标定;CCD相机;CalTag算法引言:微动台是一种常用的实验设备,广泛应用于光学、机械、电子等领域

基于直线电机宏微双重驱动大行程精密定位台的研究的任务书.docx
基于直线电机宏微双重驱动大行程精密定位台的研究的任务书一、研究背景随着科技的不断进步,对于精度和精度要求越来越高的精密定位平台也越来越重要。付出大量精力寻找能够实现高精度、高速度、长行程的定位平台,但传统的直线马达定位平台已无法满足这些要求。因此,研发一种新的实现高精度、长行程定位的平台,对于满足现代工业和科技的需求具有重要意义。二、研究内容1.研究基于直线电机的双重驱动方案研究直线电机宏微双重驱动的工作原理和动作模式,确定其应用范围和优缺点。根据研究结果,提出优化设计方案。2.研究大行程精密定位台的设计

基于宏微双重驱动的高职院校精密实验控制平台设计.docx
基于宏微双重驱动的高职院校精密实验控制平台设计基于宏微双重驱动的高职院校精密实验控制平台设计摘要:本文基于宏观微观双重驱动的理念,设计了一种高职院校精密实验控制平台。该平台利用宏观和微观相结合的驱动方式,提高了实验的精确性和稳定性。本文从平台的设计原则、硬件架构、软件开发以及实验应用等方面进行了详细的介绍和分析。实验结果表明,该控制平台在提高实验效果和实用性方面具有较好的性能,可为高职院校的实验教学提供良好的支持。关键词:宏微双重驱动、控制平台、高职院校、精密实验、实验教学引言:实验是高职院校教学中非常重

基于显微视觉伺服的微动平台精密运动控制研究.docx
基于显微视觉伺服的微动平台精密运动控制研究基于显微视觉伺服的微动平台精密运动控制研究摘要:随着科技的不断进步,微动平台在各个领域中得到广泛的应用。为了实现微动平台的精密运动控制,显微视觉伺服技术成为了研究的重点。本文以显微视觉伺服技术为基础,介绍了微动平台的基本结构和工作原理,并探讨了在精密运动控制中的应用。通过实验研究,证明了显微视觉伺服技术在微动平台精密运动控制中的优势,并提出了进一步研究的方向和展望。关键词:微动平台、显微视觉伺服技术、精密运动控制一、引言微动平台是一种能够在微米级别上进行精密运动控
基于宏微驱动和药液精确控制的自动配药装置.pdf
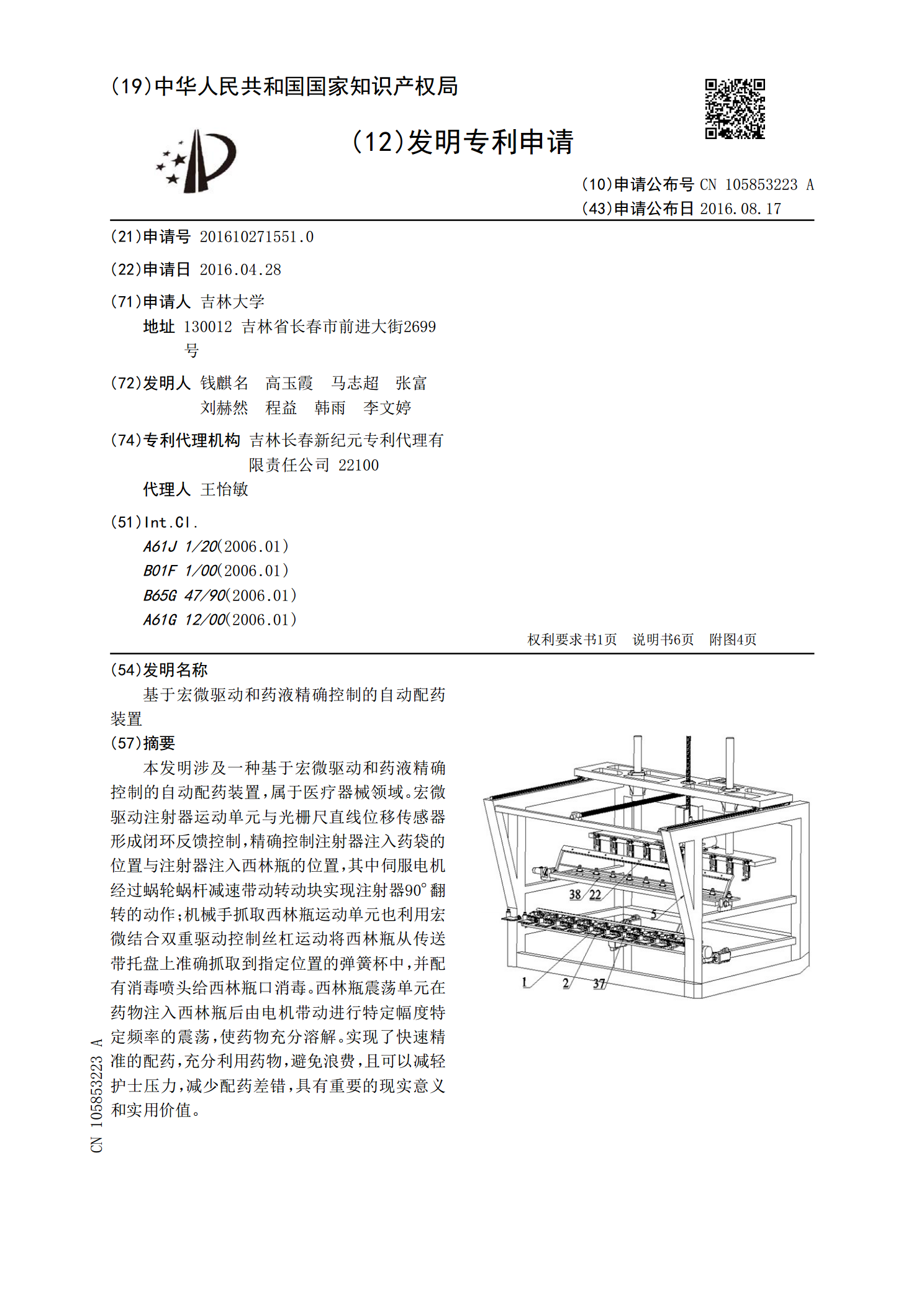
本发明涉及一种基于宏微驱动和药液精确控制的自动配药装置,属于医疗器械领域。宏微驱动注射器运动单元与光栅尺直线位移传感器形成闭环反馈控制,精确控制注射器注入药袋的位置与注射器注入西林瓶的位置,其中伺服电机经过蜗轮蜗杆减速带动转动块实现注射器90°翻转的动作;机械手抓取西林瓶运动单元也利用宏微结合双重驱动控制丝杠运动将西林瓶从传送带托盘上准确抓取到指定位置的弹簧杯中,并配有消毒喷头给西林瓶口消毒。西林瓶震荡单元在药物注入西林瓶后由电机带动进行特定幅度特定频率的震荡,使药物充分溶解。实现了快速精准的配药,充分利