
基于双目立体视觉的手持式线激光3D扫描方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目立体视觉的手持式线激光3D扫描方法.docx
基于双目立体视觉的手持式线激光3D扫描方法摘要:本文基于双目立体视觉技术,提出了一种手持式线激光3D扫描方法。通过二次曲率计算,从而得出激光的扫描线所在的平面的位置,该线平面的法向量可以由扫描线和摄像机中心到扫描平面距离的向量叉积得出。然后通过将激光点云与图像点云进行匹配,从而得到物体的3D模型。实验结果表明,该方法能够有效地进行手持式线激光3D扫描。关键词:双目立体视觉;线激光;三维扫描引言:三维扫描技术是一种将三维实体物体转化为数字化模型的技术,它在制造、现代化设计、文化遗产保护和医学等领域得到了广泛
一种基于线激光双目立体视觉的工件抓取方法.pdf
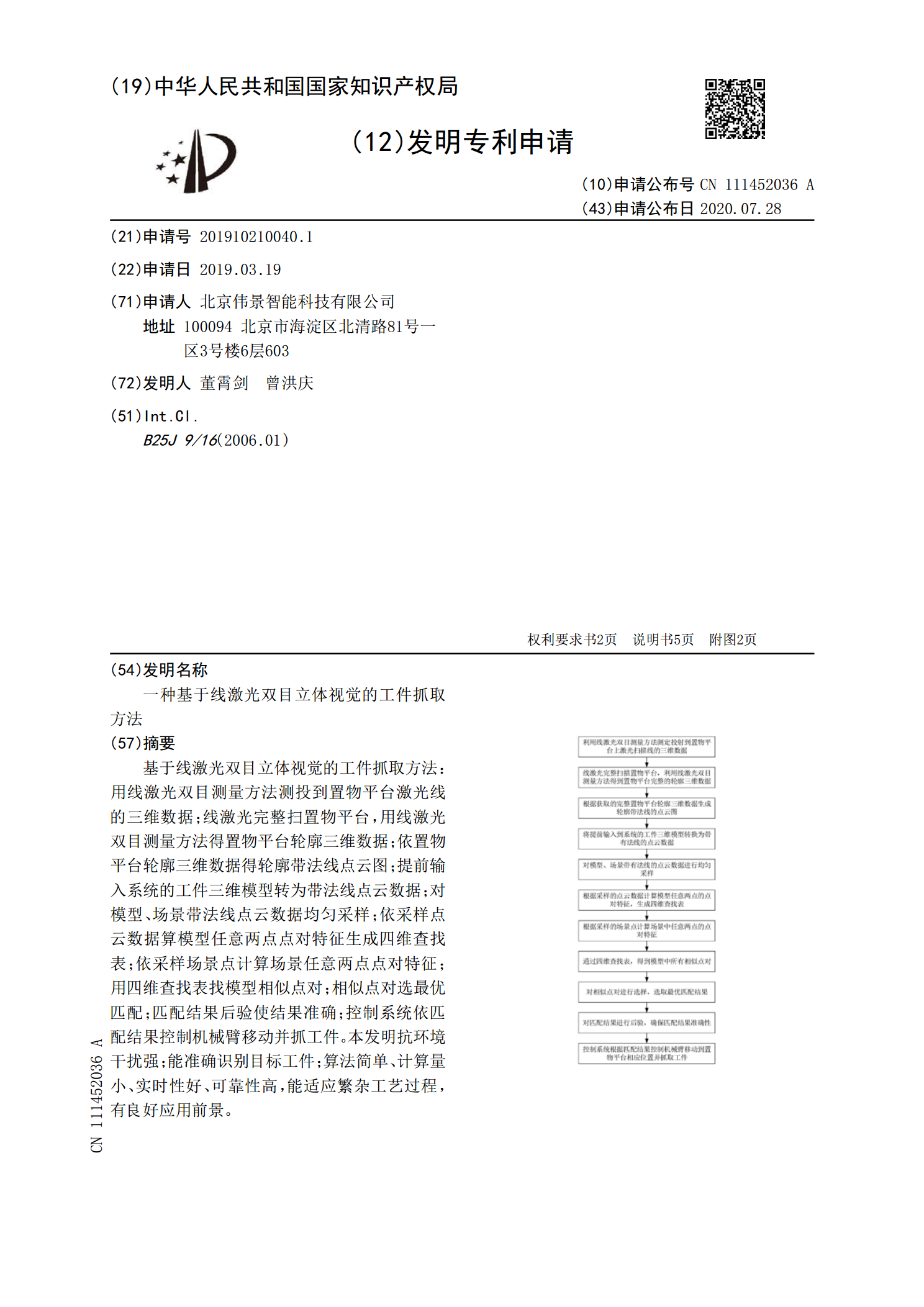
基于线激光双目立体视觉的工件抓取方法:用线激光双目测量方法测投到置物平台激光线的三维数据;线激光完整扫置物平台,用线激光双目测量方法得置物平台轮廓三维数据;依置物平台轮廓三维数据得轮廓带法线点云图;提前输入系统的工件三维模型转为带法线点云数据;对模型、场景带法线点云数据均匀采样;依采样点云数据算模型任意两点点对特征生成四维查找表;依采样场景点计算场景任意两点点对特征;用四维查找表找模型相似点对;相似点对选最优匹配;匹配结果后验使结果准确;控制系统依匹配结果控制机械臂移动并抓工件。本发明抗环境干扰强;能准确
一种基于双目视觉的多线激光扫描方法及系统.pdf
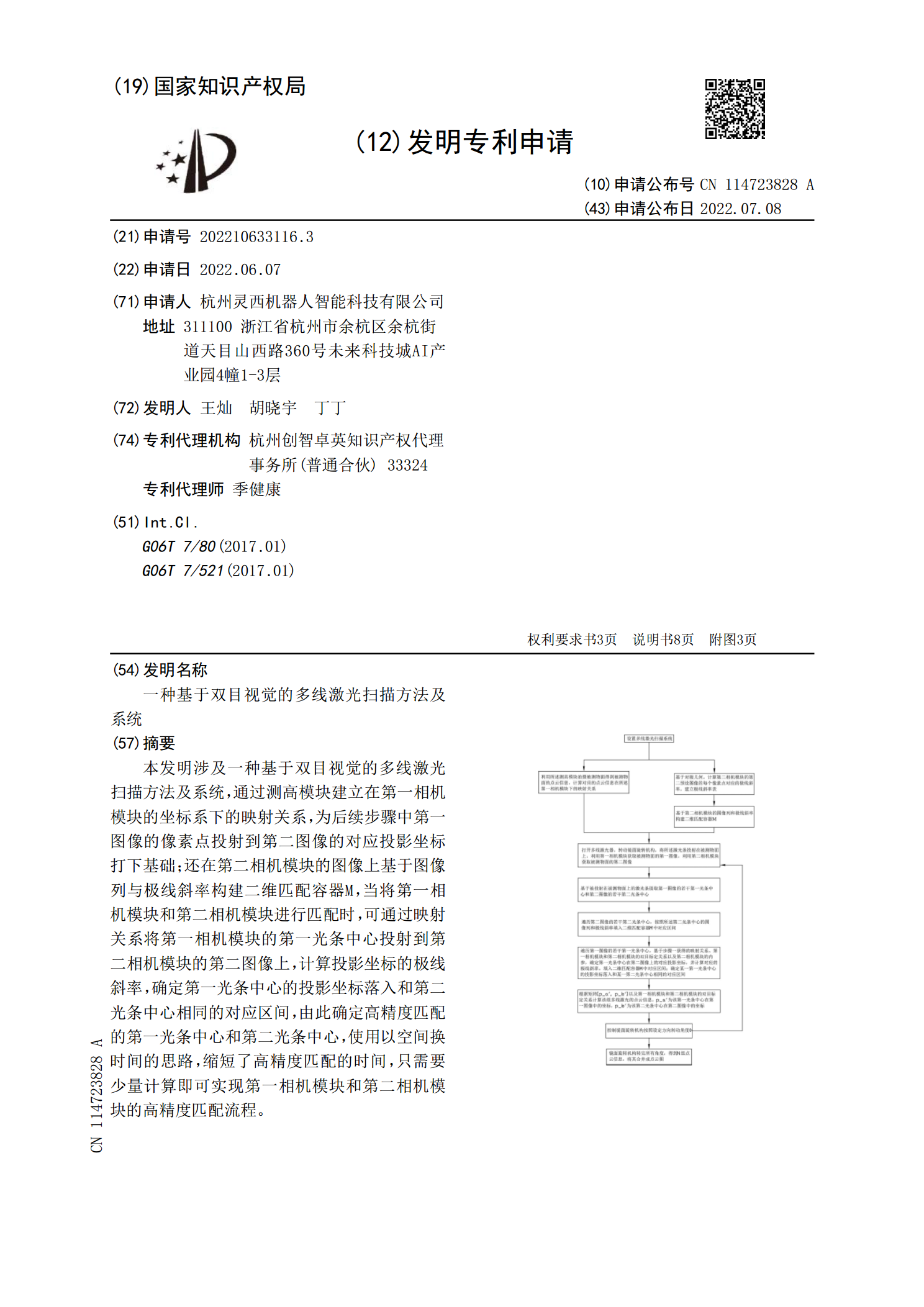
本发明涉及一种基于双目视觉的多线激光扫描方法及系统,通过测高模块建立在第一相机模块的坐标系下的映射关系,为后续步骤中第一图像的像素点投射到第二图像的对应投影坐标打下基础;还在第二相机模块的图像上基于图像列与极线斜率构建二维匹配容器M,当将第一相机模块和第二相机模块进行匹配时,可通过映射关系将第一相机模块的第一光条中心投射到第二相机模块的第二图像上,计算投影坐标的极线斜率,确定第一光条中心的投影坐标落入和第二光条中心相同的对应区间,由此确定高精度匹配的第一光条中心和第二光条中心,使用以空间换时间的思路,缩短

平行双目立体视觉的极线校正方法.docx
平行双目立体视觉的极线校正方法双目立体视觉是一种通过两个摄像机来获取场景信息的方法。使用两个摄像机可以获得一个场景的不同角度的图像,从而实现深度信息的获取。在双目立体视觉中,每个摄像机捕捉到的图像被称为视觉信息,左摄像机的视觉信息用于左眼,右摄像机的视觉信息用于右眼。这些视觉信息可以被用于计算场景的深度信息。在计算深度信息之前,我们需要对视觉信息进行极线校正。这篇论文将重点介绍平行双目立体视觉的极线校正方法。极线校正是一种处理图像几何学的操作。在双目立体视觉中,极线是两个摄像机成像目标的直线。这些直线对于

一种基于双目立体视觉的水下激光出射点定位方法.pdf
本发明属于水下定位领域,公开了一种双目立体视觉的水下激光出射点定位方法,定位方法包括以下步骤:S1:将防水激光器放至水中并打开,在水下形成一根细激光束,在同一位置上下摇摆激光器;S2:双目相机捕捉到所述激光束,获取左右相机中存在激光束的图像,并获取两帧包含水下不同位置激光的图像;S3:进行图像处理,计算两帧图像中的激光束传播的三维坐标直线方程;S4:利用两条激光直线方程计算激光出射点相对双目相机的三维空间坐标。该方法定位处理速度快,定位精度高,可提升水下双目立体定位的探测范围。