
基于Kautz模型的优化补偿预测函数控制.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Kautz模型的优化补偿预测函数控制.docx
基于Kautz模型的优化补偿预测函数控制摘要随着控制技术的不断发展,控制算法也得到了不断的改进,在工业自动化中,优化补偿预测函数控制已成为一种广泛应用的控制算法,在智能控制系统中具有重要的作用。本文将基于Kautz模型来进行优化补偿预测函数控制的研究,并对该算法的优劣点进行分析,并使用MATLAB软件进行仿真实验,证明其有效性和可行性。关键词:优化补偿预测函数控制;Kautz模型;智能控制系统一、引言优化补偿预测函数控制是一种新型的PID自适应控制方法。近几年来,随着自适应控制技术的不断发展,优化补偿预测

基于CKMTOA的SRM转矩分配函数优化补偿控制策略.docx
基于CKMTOA的SRM转矩分配函数优化补偿控制策略标题:基于CKMTOA的SRM转矩分配函数优化补偿控制策略摘要:随着科学技术的不断发展和应用的广泛,磁悬浮列车作为一种新型的交通工具,在高速、环保、安全等方面具有独特的优势。然而,由于SRM(SwitchedReluctanceMotor)的非线性和不确定性,磁悬浮列车在大型、高速场景下的运行仍然存在一些问题。因此,研究转矩分配函数的优化补偿控制策略对提高磁悬浮列车运行效率和稳定性具有重要的意义。关键词:磁悬浮列车;SRM;转矩分配函数;优化;补偿控制策

基于模型补偿的智能车辆轨迹跟踪模型预测控制方法.pdf
本发明公开了一种基于模型补偿的智能车辆轨迹跟踪模型预测控制方法,包括建立2自由度车辆动力学模型模拟智能车辆;构建由线性误差模型、预测模型和目标函数组成的模型预测控制系统,将车辆动力学模型模的微分形式进行离散线性化得到线性误差模型,将其作为模型预测控制器的预测模型,最终求取最优控制量前轮偏角δ
基于模型预测的AGC优化控制系统.pdf
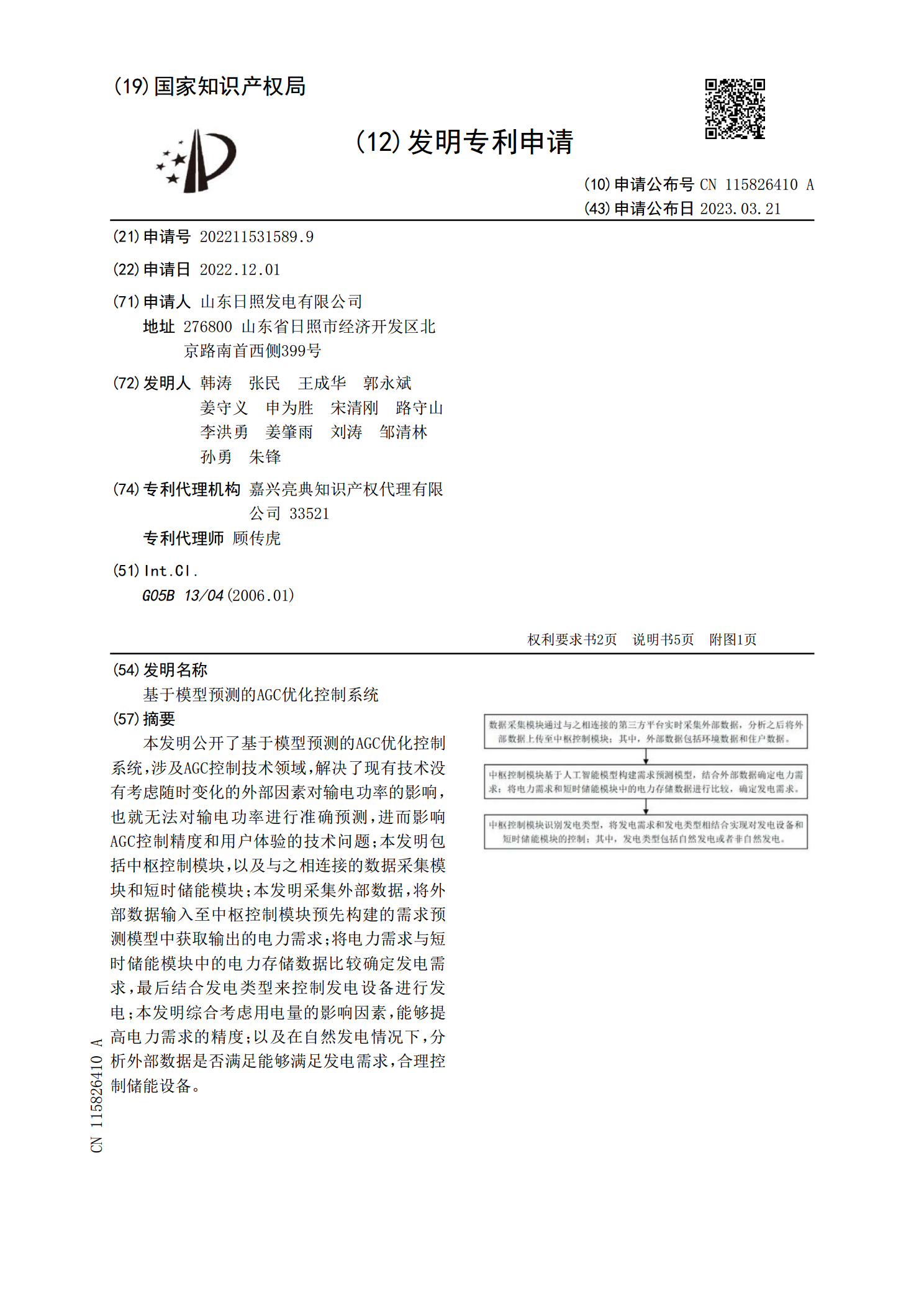
本发明公开了基于模型预测的AGC优化控制系统,涉及AGC控制技术领域,解决了现有技术没有考虑随时变化的外部因素对输电功率的影响,也就无法对输电功率进行准确预测,进而影响AGC控制精度和用户体验的技术问题;本发明包括中枢控制模块,以及与之相连接的数据采集模块和短时储能模块;本发明采集外部数据,将外部数据输入至中枢控制模块预先构建的需求预测模型中获取输出的电力需求;将电力需求与短时储能模块中的电力存储数据比较确定发电需求,最后结合发电类型来控制发电设备进行发电;本发明综合考虑用电量的影响因素,能够提高电力需求

基于动态补偿的矩形广义系统模型预测控制.docx
基于动态补偿的矩形广义系统模型预测控制基于动态补偿的矩形广义系统模型预测控制摘要:矩形广义系统模型预测控制是一种基于状态空间形式的控制方法,通过预测当前状态的未来演化来生成控制信号。然而,传统的预测控制方法存在一些问题,如系统模型的不确定性和外部干扰的影响。为了解决这些问题,本文提出了一种基于动态补偿的矩形广义系统模型预测控制方法。该方法在预测模型中引入一个补偿项,通过在线更新该补偿项来适应系统的不确定性和外部干扰。通过在数学模型中引入补偿项并使用优化方法来计算最优控制信号,可以得到较好的控制性能。在实验