
基于云模型的虚拟人摇头动作不确定性控制.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于云模型的虚拟人摇头动作不确定性控制.docx
基于云模型的虚拟人摇头动作不确定性控制基于云模型的虚拟人摇头动作不确定性控制摘要:虚拟人的表情和动作对于与人类用户的交互至关重要,在虚拟人的动作控制中,不确定性是一个重要的挑战。本论文提出了一种基于云模型的虚拟人摇头动作不确定性控制方法。该方法利用云模型将传感器数据的不确定性进行建模,并通过动作控制策略实现对虚拟人摇头动作的精确控制。实验证明,该方法能够提高虚拟人摇头动作的准确性和稳定性。关键词:虚拟人,不确定性控制,云模型,摇头动作1.引言虚拟人体验在计算机图形学和人机交互领域具有广泛的应用。为了使虚拟

基于Kinect的虚拟人物模型运动控制研究.docx
基于Kinect的虚拟人物模型运动控制研究摘要:本文主要介绍了一种基于Kinect的虚拟人物模型运动控制方法。该方法利用Kinect传感器捕捉人体动作,通过处理算法将捕获的数据转换为相应的运动信号,控制虚拟人物模型的运动。该方法具有实时性、精度高、易操作等优点,在虚拟现实、游戏、医疗等领域有着广泛的应用前景。关键词:Kinect;虚拟人物模型;运动控制;数据处理;应用前景一、引言近年来,随着虚拟现实技术、游戏技术、医疗技术的不断发展,人们对于虚拟人物的需求越来越多。利用虚拟人物可以完成各种各样的任务,如游

基于深度图像的虚拟人动作控制方法研究.docx
基于深度图像的虚拟人动作控制方法研究摘要:本文旨在探讨一种基于深度图像的虚拟人动作控制方法。该方法通过使用深度相机采集实时的人体动作信息,并利用深度图像处理技术对获取的深度图像进行处理和分析,以精准地捕捉人体动作信息。同时,本文还研究了一种基于神经网络的动作预测方法,可以对下一帧动作进行预测,实现更加流畅自然的动作控制。通过实验验证,本文方法可以有效地对虚拟人进行自然流畅的姿态控制,为虚拟现实应用提供了有力的支持。关键词:深度图像,虚拟人,动作控制,神经网络Abstract:Thepurposeofthi
基于云理论的新的不确定性推理模型研究.pdf
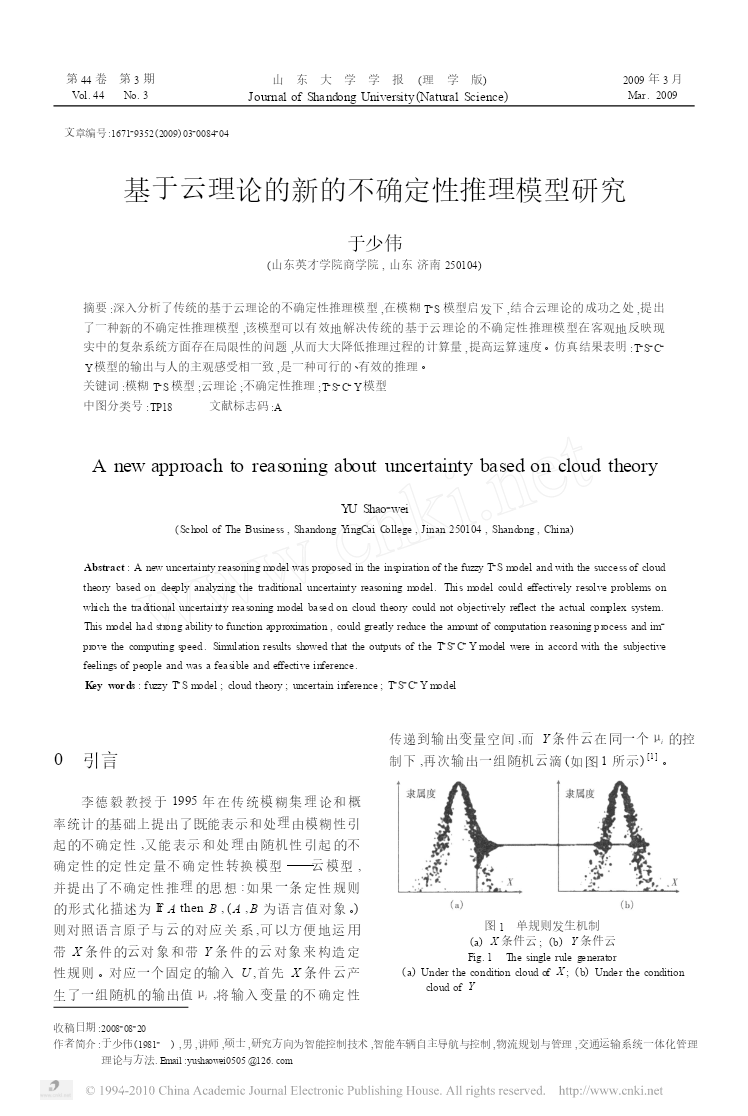
第44卷第3期山东大学学报(理学版)2009年3月Vol.44No.3JournalofShandongUniversity(NaturalScience)Mar.2009文章编号:167129352(2009)0320084204基于云理论的新的不确定性推理模型研究于少伟(山东英才学院商学院,山东济南250104)摘要:深入分析了传统的基于云理论的不确定性推理模型,在模糊T2S模型启发下,结合云理论的成功之处,提出了一种新的不确定性推理模型,该模型可以有效地解决传统的基于云理论的不确定性推理模型在客观地

基于风机模型不确定性的鲁棒控制.docx
基于风机模型不确定性的鲁棒控制基于风机模型不确定性的鲁棒控制摘要:在风能开发领域,风机的控制策略是一个重要的研究方向。然而,由于风能系统的非线性特性和不确定性,传统的控制方法往往不能满足对风机高鲁棒性和性能要求,因此需要采用基于鲁棒控制的方法。本文将针对风机模型的不确定性,提出一种基于鲁棒控制的控制算法,以提高风机的运行效果和稳定性。1.引言风能作为一种清洁可再生能源,受到了广泛关注。风机作为风能系统的关键组成部分,其控制策略直接影响风能转化效率和稳定性。然而,风机系统的非线性特性和不确定性使得传统控制方