
基于G_F集的锻造操作机构型方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于G_F集的锻造操作机构型方法.docx
基于G_F集的锻造操作机构型方法锻造是一种制造工艺,其过程是将金属材料放在压力下,使其改变形状和性质。锻造操作机构是锻造过程中的一个关键部分,其设计和选择对最终产品的质量和效率都会产生影响。本文将介绍G_F集及其在锻造操作机构型方法中的应用。G_F集是一个广义模糊集合,它由许多相关指标的隶属度函数组成。在锻造操作机构的设计中,有很多因素需要被考虑,包括材料、形状、温度、压力等。这些因素都可以被视为相关指标,它们之间的关系可以通过G_F集来表示。使用G_F集来设计锻造操作机构的主要优点是它可以将多个指标(如

基于G_F集的三移两转并联机器人构型研究.docx
基于G_F集的三移两转并联机器人构型研究摘要:本文主要探讨基于G_F集的三移两转并联机器人构型研究,论文首先介绍了三移两转并联机器人的基本构型,然后对基于G_F集的机器人构型优化进行了论述,最后通过实例展示了该机器人构型的优越性和实用性。本文通过详细分析和实例展示,充分验证了基于G_F集的机器人构型优化对于提高机器人运动精度和工作效率的重要作用。关键词:G_F集;三移两转;并联机器人;构型研究1.研究背景随着自动化技术的飞速发展,机器人技术在各个领域得到广泛应用,其中并联机器人作为高精度和高速度的机器人系

基于G_F集理论的三转动四支链并联机构构型综合.docx
基于G_F集理论的三转动四支链并联机构构型综合标题:基于G_F集理论的三转动四支链并联机构构型综合摘要:随着机器人技术的快速发展,机构设计在现代工程中扮演着重要的角色。并联机构作为一种特殊的机构形式,在工业自动化、机器人学和航天领域中得到广泛应用。本文基于G_F集理论,对三转动四支链并联机构的构型进行综合研究和分析,旨在提供一种可行的方法来设计这类机构,以满足特定的工程需求。关键词:机构设计,并联机构,三转动四支链,G_F集理论第一节引言近年来,机器人技术的发展在各行业得到广泛应用。并联机构是机器人技术的

锻造操作机构型及耦合分析.docx
锻造操作机构型及耦合分析锻造操作机构型及耦合分析摘要:随着人民生活水平和科学技术的不断发展,人们对于产品的质量和性能有了更高的要求。锻造是制造业中常见的一种加工方法,其工艺流程和设备要求十分严格。针对锻造操作机构的设计和优化,本文对其类型、组成、特点进行了分析,并基于耦合系统理论,给出了锻造操作机构的耦合分析方法。关键词:锻造操作机构;耦合分析;系统优化一、锻造操作机构的类型和组成锻造是将金属材料加热至一定温度,经过力的作用,改变其形状和组织结构的加工方法。而锻造操作机构就是完成锻造工艺的设施和设备。按照
无轨锻造操作机.pdf
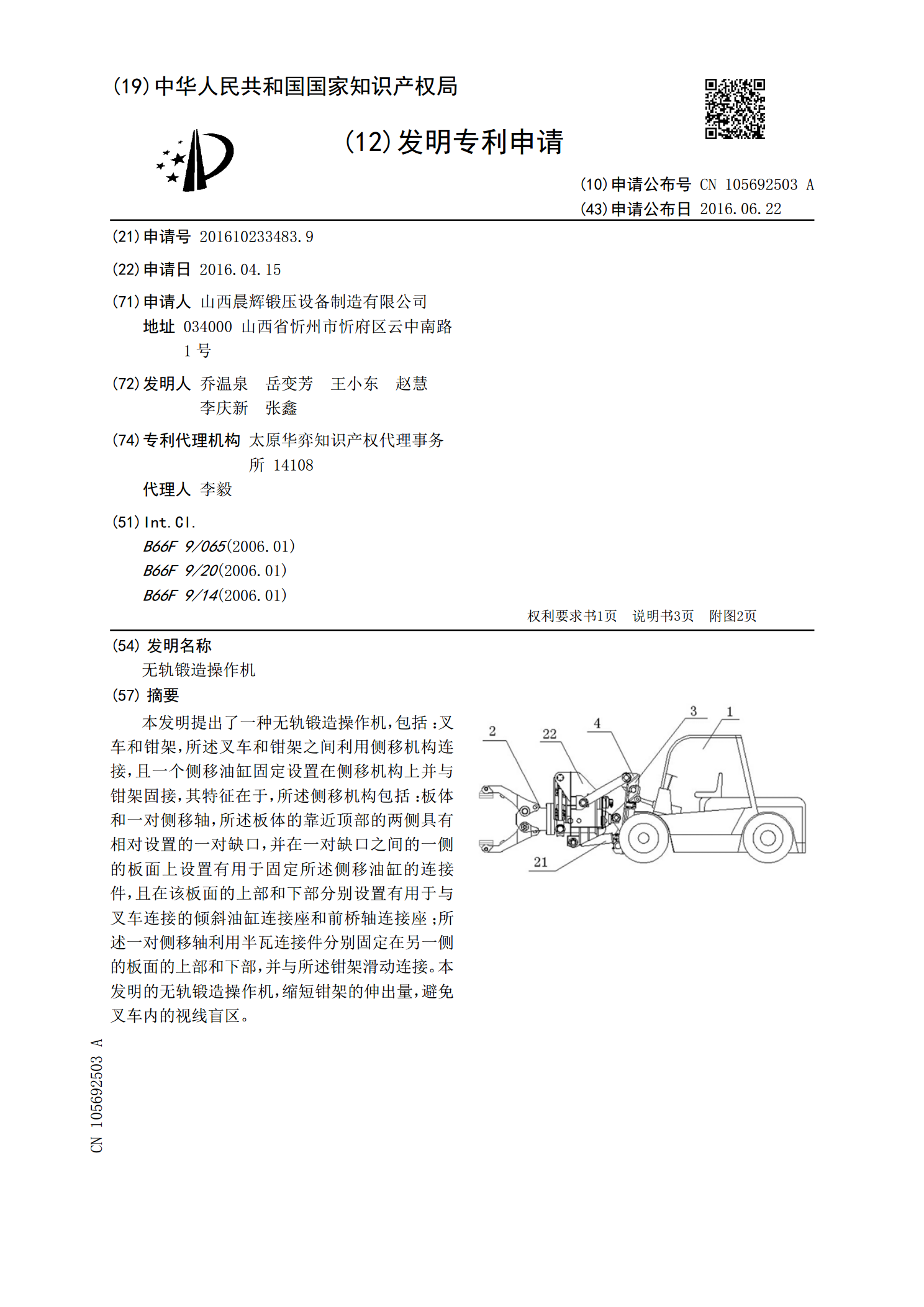
本发明提出了一种无轨锻造操作机,包括:叉车和钳架,所述叉车和钳架之间利用侧移机构连接,且一个侧移油缸固定设置在侧移机构上并与钳架固接,其特征在于,所述侧移机构包括:板体和一对侧移轴,所述板体的靠近顶部的两侧具有相对设置的一对缺口,并在一对缺口之间的一侧的板面上设置有用于固定所述侧移油缸的连接件,且在该板面的上部和下部分别设置有用于与叉车连接的倾斜油缸连接座和前桥轴连接座;所述一对侧移轴利用半瓦连接件分别固定在另一侧的板面的上部和下部,并与所述钳架滑动连接。本发明的无轨锻造操作机,缩短钳架的伸出量,避免叉车