
利用角度测量估计机动目标运动参数的方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

利用角度测量估计机动目标运动参数的方法.docx
利用角度测量估计机动目标运动参数的方法在空间动态目标的定位和跟踪中,估计目标的运动参数是十分关键的一步。而在许多情况下,由于缺乏速度和加速度等直接的测量值,因此需要借助于角度测量来对目标的运动参数进行估计。本文将介绍一些利用角度测量来估计机动目标运动参数的方法,包括目标运动轨迹预测、角度测量模型、运动参数估计算法等方面。一、目标运动轨迹预测通过预测目标的运动轨迹,可以为后续的角度测量提供重要信息。一些基于卡尔曼滤波等算法的物体运动估计方法,可以根据前一时刻的运动状态估计出目标的当前状态,从而预测目标下一时

一种估计机动目标运动参数的方法.docx
一种估计机动目标运动参数的方法标题:基于Kalman滤波的机动目标运动参数估计方法摘要:估计机动目标的运动参数在目标跟踪、运动预测以及行为分析等领域具有重要的应用价值。本文提出了一种基于Kalman滤波的机动目标运动参数估计方法。该方法通过结合目标动态模型和观测信息,利用Kalman滤波算法实现对目标位置、速度和加速度等运动参数的精确估计。实验结果表明,所提出的方法能够有效地提高目标运动参数的估计精度。关键词:机动目标、运动参数、估计方法、Kalman滤波1.引言机动目标的运动参数估计是目标跟踪、运动预测

瞬时频率估计的水下运动目标参数估计方法.docx
瞬时频率估计的水下运动目标参数估计方法瞬时频率估计的水下运动目标参数估计方法摘要:瞬时频率是水下运动目标参数估计中的一个重要指标,能够反映运动目标的频率特性。本文综述了瞬时频率估计的水下运动目标参数估计方法,包括基于信号处理和机器学习的方法。在信号处理方面,瞬时频率估计方法包括基于时频分析的方法、基于Hilbert变换的方法和基于基频追踪的方法。在机器学习方面,瞬时频率估计方法包括基于卷积神经网络的方法和基于循环神经网络的方法。本文还探讨了这些方法的优缺点,并对未来的研究方向进行了展望。关键词:瞬时频率估
一种估计目标运动参数的方法.pdf
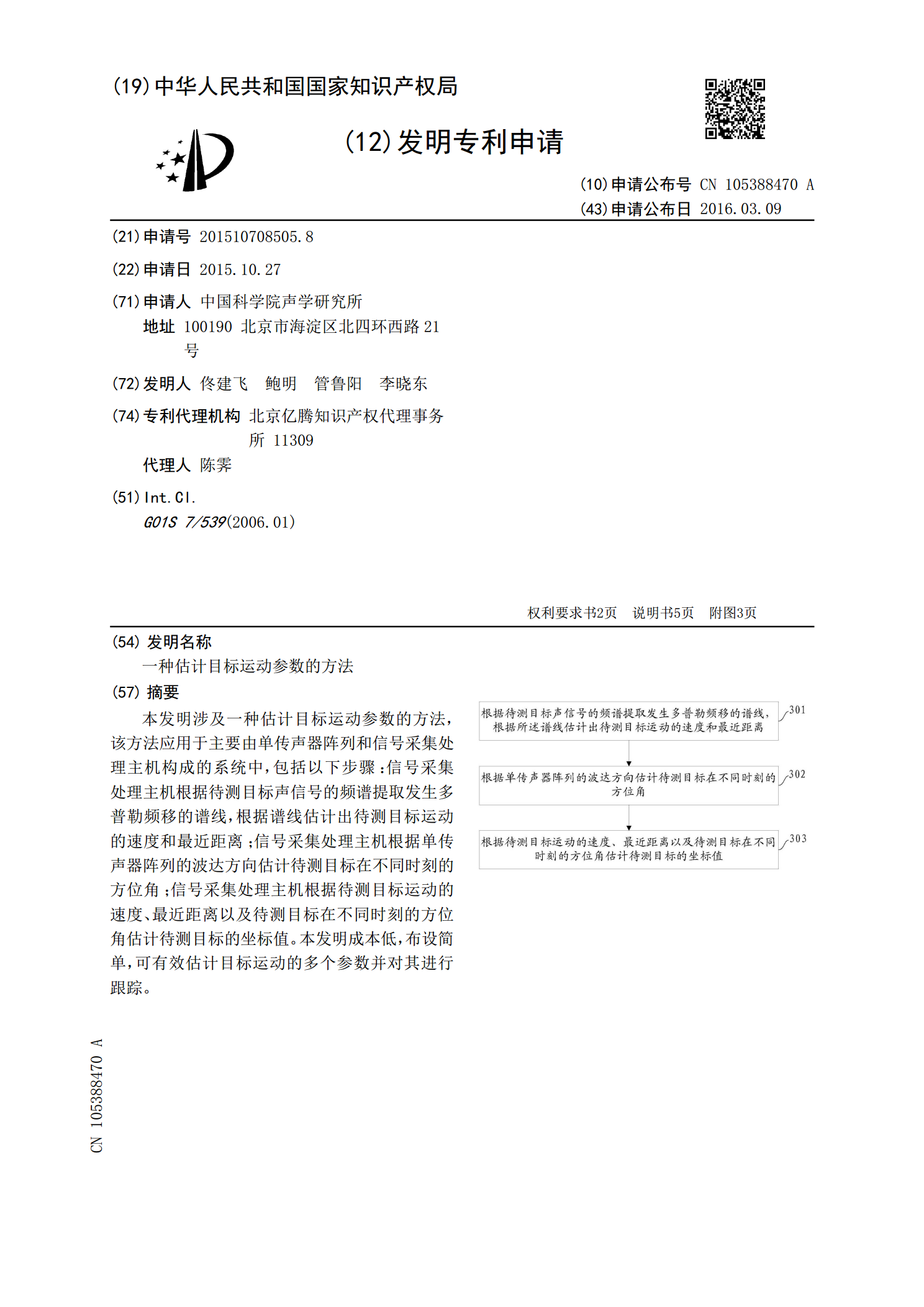
本发明涉及一种估计目标运动参数的方法,该方法应用于主要由单传声器阵列和信号采集处理主机构成的系统中,包括以下步骤:信号采集处理主机根据待测目标声信号的频谱提取发生多普勒频移的谱线,根据谱线估计出待测目标运动的速度和最近距离;信号采集处理主机根据单传声器阵列的波达方向估计待测目标在不同时刻的方位角;信号采集处理主机根据待测目标运动的速度、最近距离以及待测目标在不同时刻的方位角估计待测目标的坐标值。本发明成本低,布设简单,可有效估计目标运动的多个参数并对其进行跟踪。

目标运动参数快速估计新方法.docx
目标运动参数快速估计新方法摘要:目标运动参数的快速估计一直是研究领域的热点问题。本文提出了一种新的方法,通过利用神经网络的非线性拟合以及卡尔曼滤波的实时迭代处理来实现快速估计。在实验部分,我们使用了多组实际数据进行了验证,证明了该方法的高效和精度。关键词:目标运动参数,快速估计,神经网络,卡尔曼滤波Introduction:目标运动参数的快速估计一直是研究领域的热点问题。在物体跟踪、车辆行驶状态检测等领域,对目标运动参数的快速准确估计提供了极大地帮助。因此,如何提高运动参数估计的速度和精度一直是研究者们探