
三维柔性微动平台拓扑优化设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

三维柔性微动平台拓扑优化设计.docx
三维柔性微动平台拓扑优化设计三维柔性微动平台在微纳技术领域中具有广泛的应用,其设计优化对于提升性能、降低成本具有重要意义。本文通过研究三维柔性微动平台的结构,运用拓扑优化方法对其进行设计优化,以达到提高性能和降低成本的目的。一、三维柔性微动平台的结构分析三维柔性微动平台是由底部支撑结构和上部工作部件构成的。支撑结构包括底部底板和脚框,上部工作部件包括电极板、导电电缆、惯性质量块等。其结构如图1所示。图1三维柔性微动平台示意图其中,电极板是微动平台的主体,固定在脚框和惯性质量块之间,实现微小位移的测量和控制

动态特性可调的微动平台优化设计.docx
动态特性可调的微动平台优化设计摘要:微动平台是一种能够实现微动力控制、微尺度精度的测量和制造加工的重要工具,因此在许多领域中都有广泛的应用。本文介绍了一种动态特性可调的微动平台优化设计的方法,该方法可以通过优化平台的机械结构和控制参数来提高平台的性能。第一部分:引言微动平台是一种用于控制小电机或其他微动力元件的高精度平台,该平台可以在微尺度下进行运动控制和测量。微动平台在医学、生物学、微机电系统(MEMS)、机器人等领域中有重要的应用。近年来,由于微纳米技术的发展,微动平台的制造和控制技术不断提高,已经实

柔性位移放大机构拓扑优化设计研究.docx
柔性位移放大机构拓扑优化设计研究柔性位移放大机构是一种利用弹性材料放大机构性能的一种设计方法。本文旨在探讨柔性位移放大机构的拓扑优化设计,并分析其在工程应用中的优势和适用领域。一、柔性位移放大机构的原理介绍柔性位移放大机构是一种通过改变材料弹性模量和几何结构来放大位移的机构。其主要原理是通过设计合适的杆件长度和连杆比例,使得机构的输出位移显著大于输入位移。例如,当一个拉伸和一个弯曲杆件相互串联时,拉伸杆会被拉长,弯曲杆则会发生弯曲,从而导致端部位移增大。通过控制杆件长度和连杆比例可以使输出位移大于输入位移

具有零刚度特性的微动平台优化设计.docx
具有零刚度特性的微动平台优化设计标题:具有零刚度特性的微动平台优化设计摘要:微动平台是一种用于精确位置控制的微型机械设备。具有零刚度特性的微动平台能够在不增加额外负载的情况下实现无约束的微小位移,具有极高的位置控制和运动精度,广泛用于微操作、医疗设备、光学设备等领域。本文基于零刚度特性的微动平台设计的需求,对其进行优化设计,并通过仿真和实验验证了设计方案的可行性和优越性。关键词:微动平台;零刚度;优化设计;仿真;实验1.引言微动平台是一种基于微机电系统技术的精密机械设备,通过微小位移实现精确位置控制。传统
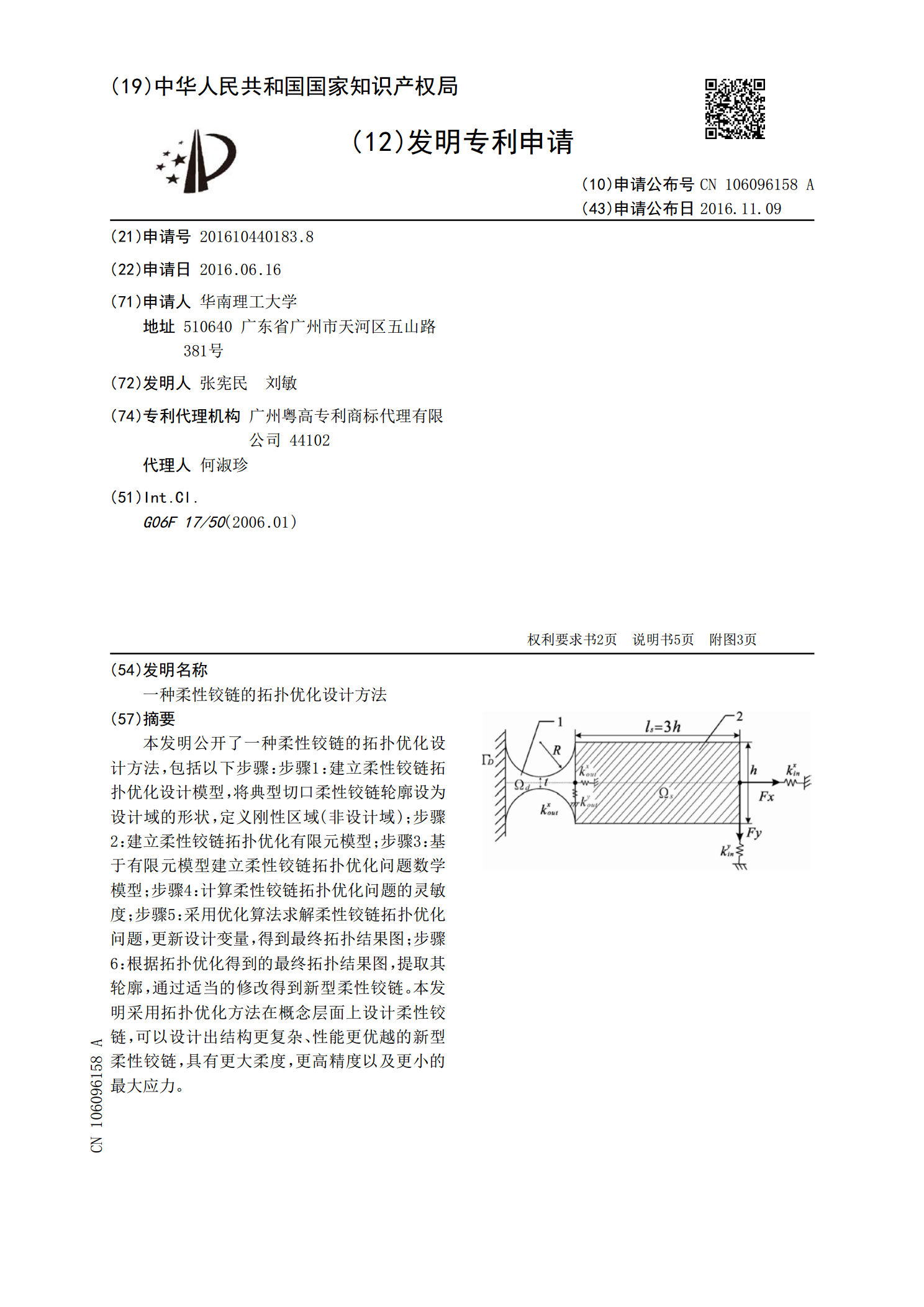
一种柔性铰链的拓扑优化设计方法.pdf
本发明公开了一种柔性铰链的拓扑优化设计方法,包括以下步骤:步骤1:建立柔性铰链拓扑优化设计模型,将典型切口柔性铰链轮廓设为设计域的形状,定义刚性区域(非设计域);步骤2:建立柔性铰链拓扑优化有限元模型;步骤3:基于有限元模型建立柔性铰链拓扑优化问题数学模型;步骤4:计算柔性铰链拓扑优化问题的灵敏度;步骤5:采用优化算法求解柔性铰链拓扑优化问题,更新设计变量,得到最终拓扑结果图;步骤6:根据拓扑优化得到的最终拓扑结果图,提取其轮廓,通过适当的修改得到新型柔性铰链。本发明采用拓扑优化方法在概念层面上设计柔性铰