
基于笔画片段和轮廓特征的笔迹识别方法.pdf

一吃****天材

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于笔画片段和轮廓特征的笔迹识别方法.pdf
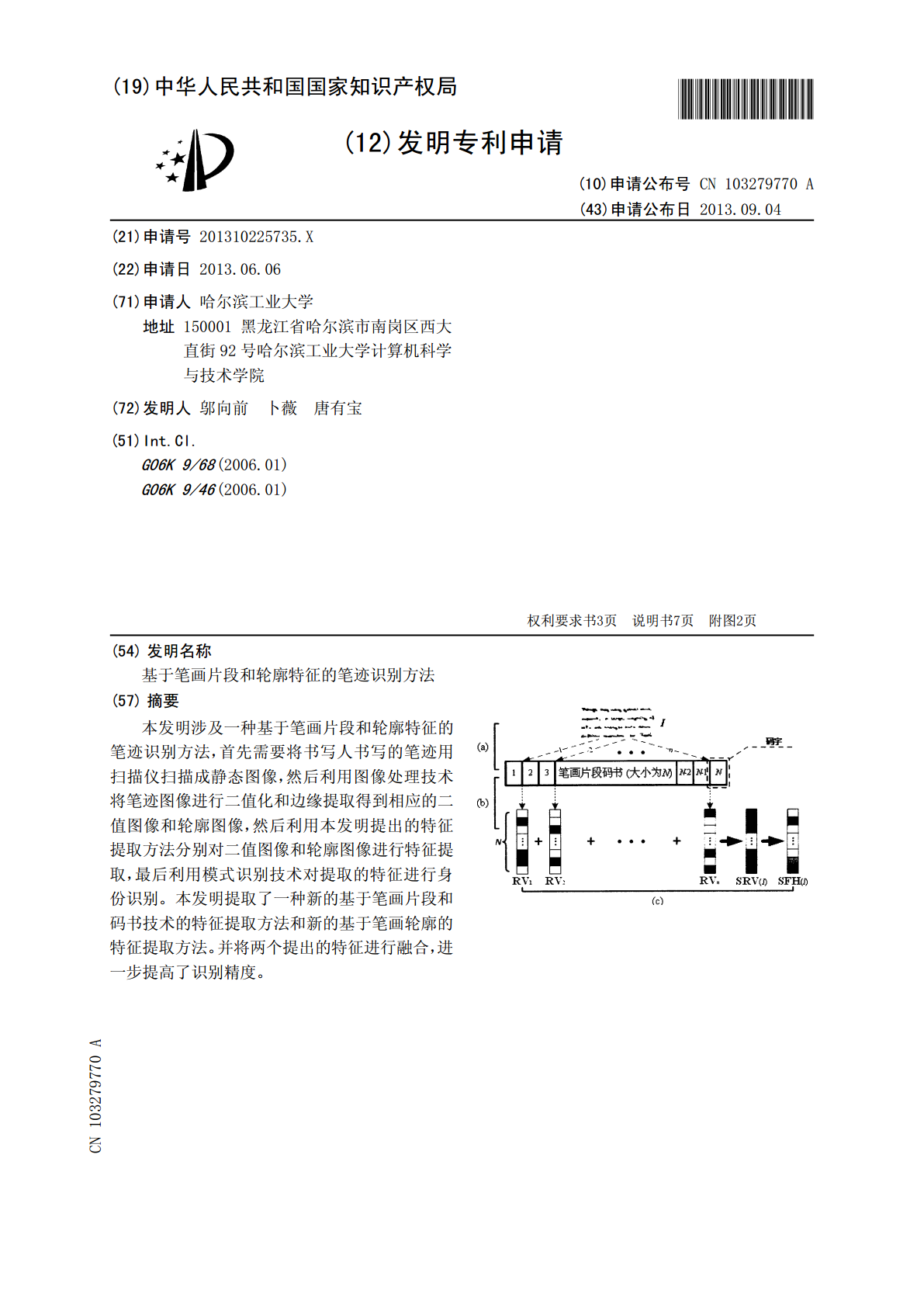
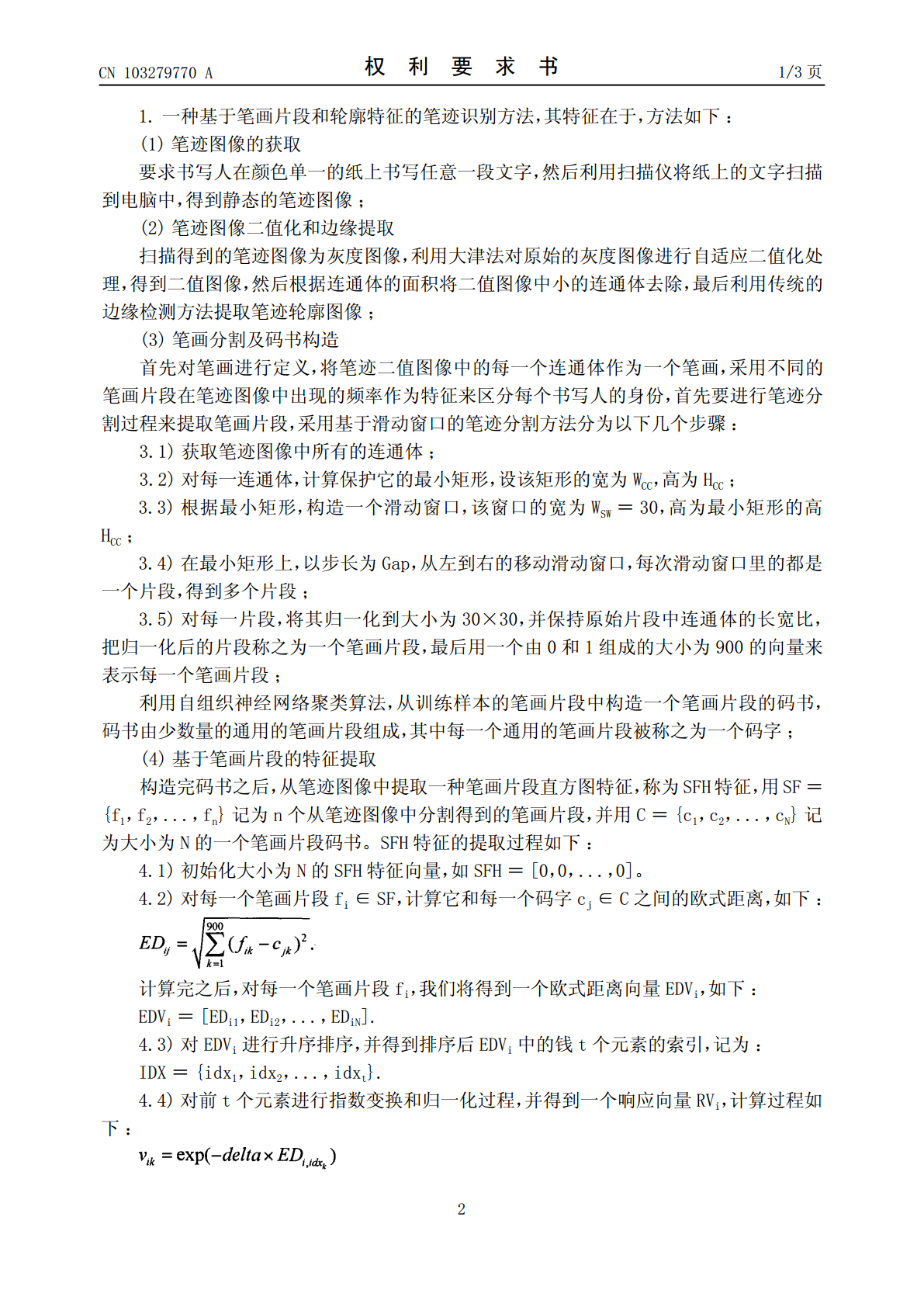
本发明涉及一种基于笔画片段和轮廓特征的笔迹识别方法,首先需要将书写人书写的笔迹用扫描仪扫描成静态图像,然后利用图像处理技术将笔迹图像进行二值化和边缘提取得到相应的二值图像和轮廓图像,然后利用本发明提出的特征提取方法分别对二值图像和轮廓图像进行特征提取,最后利用模式识别技术对提取的特征进行身份识别。本发明提取了一种新的基于笔画片段和码书技术的特征提取方法和新的基于笔画轮廓的特征提取方法。并将两个提出的特征进行融合,进一步提高了识别精度。
基于显著性轮廓特征片段的目标识别方法.pdf
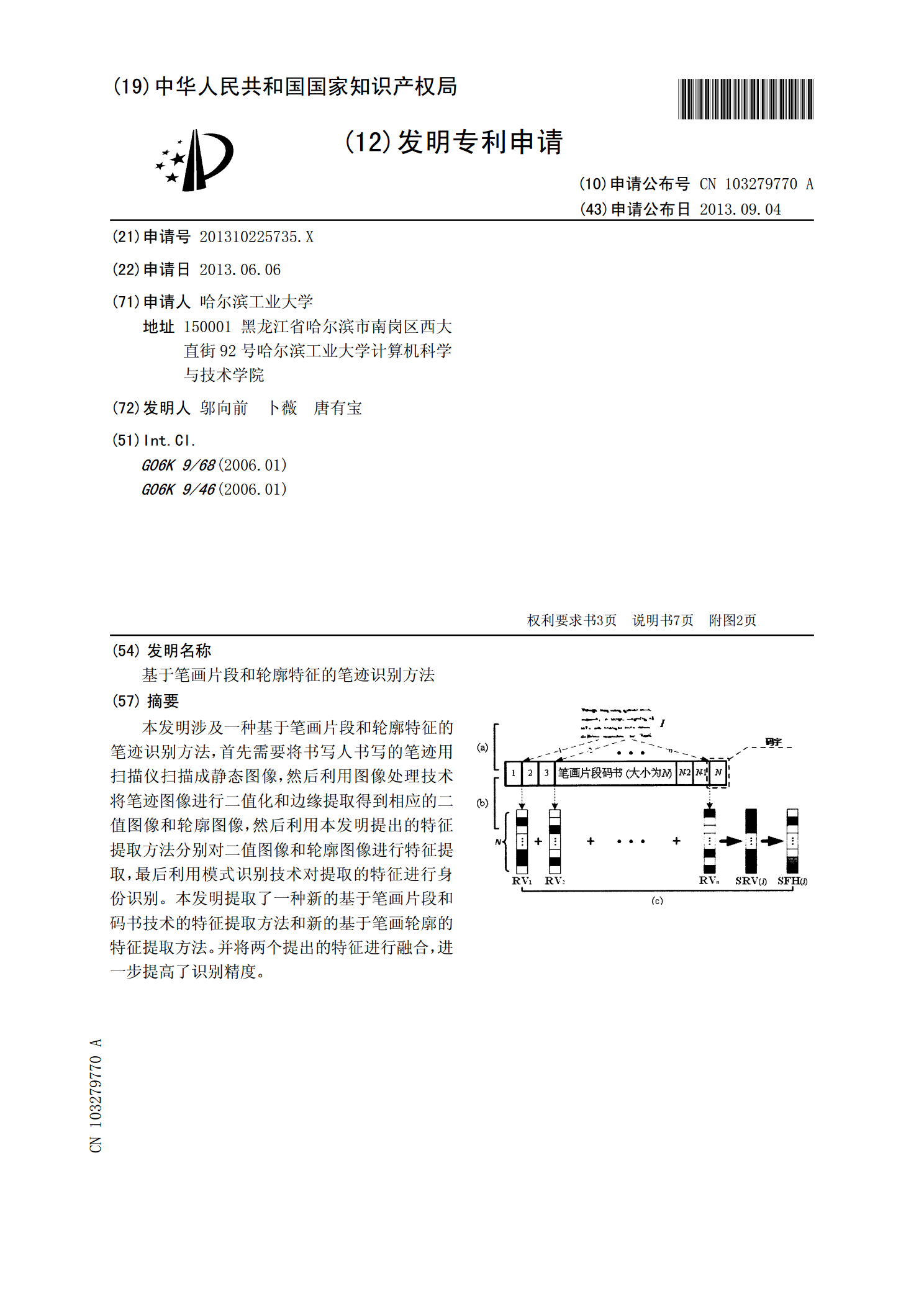
基于显著性轮廓特征片段的目标识别方法,包括以下步骤:步骤一、轮廓曲率计算及划分;步骤二、获得具有显著特征的轮廓片段;步骤三、轮廓片段的目标识别。本发明相对于现有的技术,确定了轮廓片段划分的显著性评价参数,通过价值性和重要性对轮廓片段进行整体评价,保证了所划分的轮廓片段具有显著特征,并有效应用于轮廓片段的目标识别,提高了目标识别率。
基于多轮廓特征融合的步态识别方法.pdf
本发明公开了基于多轮廓特征融合的步态识别方法,涉及机器视觉技术领域,使用了目前步态识别中常见的基于非模型的方法提取特征,该方法简单有效,所有的特征在同一组图像序列中获取,使得特征方便提取,而且本发明提取的特征维度较低,因此识别时反应时间较短。本发明的方法在90度的视角下取得98.33%的识别率,同时在其他角度下也有着90%以上的识别率。

基于目标轮廓特征的图像识别方法.pdf
一种基于目标轮廓特征的图像识别方法,根据目标的轮廓特征而非整个模板计算相似度,并据此对模板进行分析得到最小类间距离,在搜索过程中,结合最小类间距离及适应度对群体进行划分,并通过局部搜索快速得到局部极值。图像识别是工业自动化领域中的重要课题,特别是当目标之间存在交错时,如何有效的识别多个目标是亟待解决的问题。本发明有效提高了搜索效率,保证了识别的实时性。将这种方法应用于半导体检测及生产设备机器视觉系统中,能够高效准确地识别定位场景图像中的多个重复目标。

基于轮廓提取的工业图像特征识别方法及系统.pdf
本发明提供一种基于轮廓提取的工业图像特征识别方法及系统,其中的方法包括:提取工业原始图像的特征轮廓信息,获取工业原始图像的各部分检测区域的位置信息;对各部分检测区域进行特征识别检测;对各部分检测区域的检测结果进行整合,并将整合后的检测结果返回。利用本发明,能够解决目前难度较大的图像处理主要靠人工识别的问题。