
一种自动检测跟踪水位的方法.pdf

猫巷****忠娟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动检测跟踪水位的方法.pdf
一种自动检测跟踪水位的方法,目的是既能测量水位又能实时跟踪水位;本发明先制作一套自动检测跟踪水位装置,该装置包括水位检测探针、探针导线、交流电激励电路、信号检测处理电路、单片机、步进电机、连接齿轮、丝杠及丝杠底座、丝杠螺丝、仪器架和安装台;水位检测探针垂直于水平面固定,顶端平齐,底端呈阶梯状排列,信号检测处理电路连接至单片机,单片机连接至步进电机,步进电机转轴连接至连接齿轮,连接齿轮与丝杠齿合,丝杠底座连接至仪器架;将上述自动检测跟踪水位装置固定在安装台上;依据水的弱导电特性进行水位测量,跟踪水位是依据三
一种水位自动检测装置.pdf
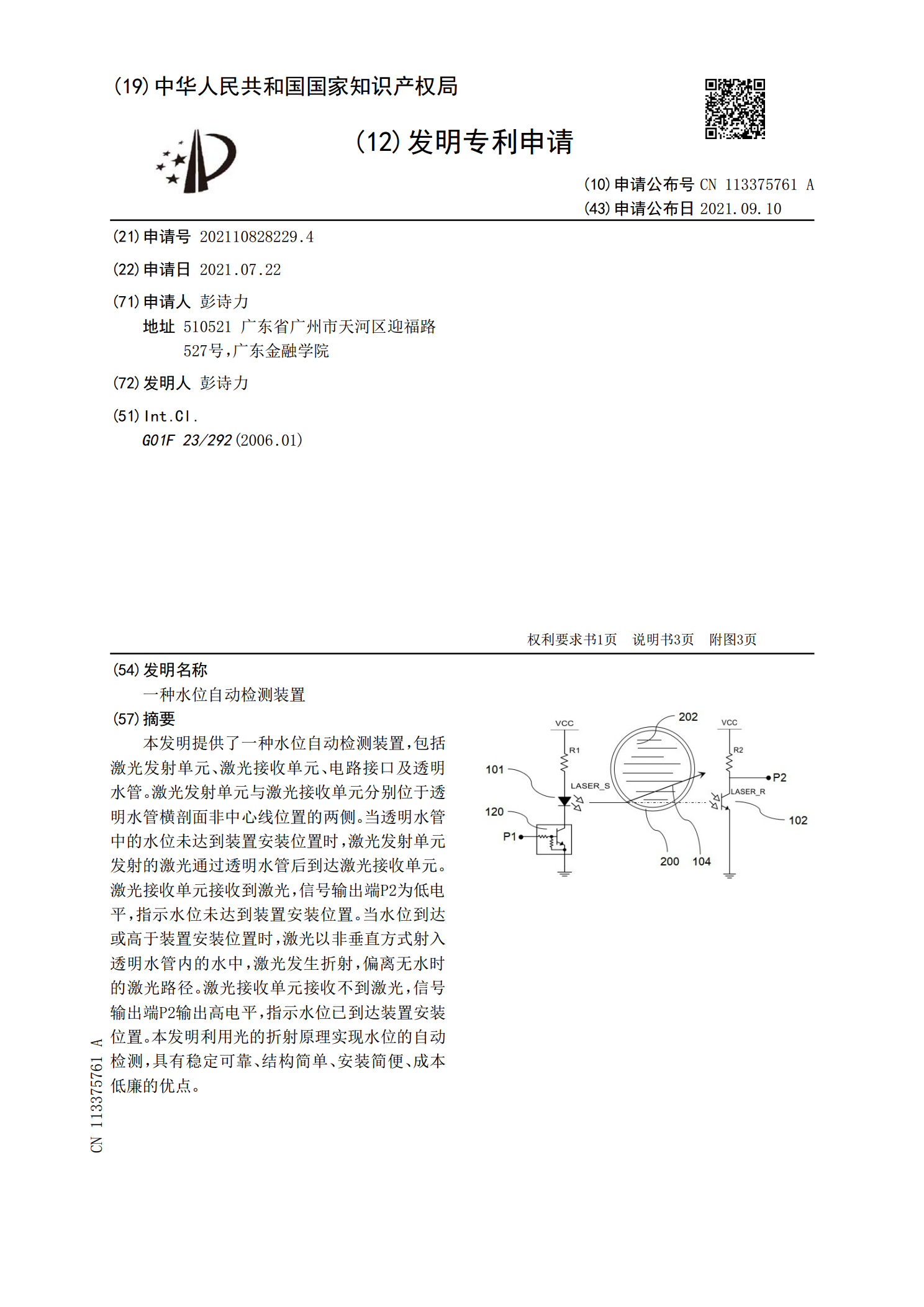
本发明提供了一种水位自动检测装置,包括激光发射单元、激光接收单元、电路接口及透明水管。激光发射单元与激光接收单元分别位于透明水管横剖面非中心线位置的两侧。当透明水管中的水位未达到装置安装位置时,激光发射单元发射的激光通过透明水管后到达激光接收单元。激光接收单元接收到激光,信号输出端P2为低电平,指示水位未达到装置安装位置。当水位到达或高于装置安装位置时,激光以非垂直方式射入透明水管内的水中,激光发生折射,偏离无水时的激光路径。激光接收单元接收不到激光,信号输出端P2输出高电平,指示水位已到达装置安装位置。

一种锅炉的水位自动检测装置.pdf
本发明公开了一种锅炉的水位自动检测装置,包括锅炉、安装在锅炉内顶壁上的水位传感器及通过水管与锅炉连通的供水箱;所述水管上安装有阀门及流量传感器,所述阀门上安装有开度控制器,所述开度控制器包括驱动开关和开度传感器;所述水位传感器的位感信号通过信号处理电路至A/D转换开关,并经过A/D转换开关转换后输送至PLC控制器;PLC控制器发出的指令信号输送至开度控制器,开度控制器控制驱动开关驱动阀门;本发明可实现智能化的锅炉水位检测、供水定时开启/关闭功能,从而解放了劳动力,避免了人工操作失误等情况,保证了锅炉的正常

一种无人机自动检测目标和跟踪方法.pdf
本发明公开了一种无人机自动检测目标和跟踪方法,涉及无人机自动检测和跟踪技术领域,本发明能够根据立体建模以及loop算法,获取检测目标进行多角度采集时的图像,再对采集图像进行特征提取处理,得到不同采集角度下的图像特征数据,从而对实时采集数据进行比对计算,得出相邻帧图像中目标的运动速度,并根据目标移动速度调节无人机的拍摄角度及移动速度,极大地提升了无人机对目标的检测跟踪效果。

一种基于移动目标跟踪的机动车自动检测方法.pdf
本发明属于电子领域,具体涉及一种基于移动目标跟踪的机动车自动检测方法,对摄像头的图像进行处理,分割前景与背景,阈值化处理得到车辆的二值化图像,通过腐蚀函数来查找二值轮廓从而判断符合汽车的宽度和高度,通过运算检测判断图像是否有汽车,有则触发录像功能像;无车辆出现,则结束录像。与现有技术相比,本发明能够只记录有效的数据,有车经过就录像,没车经过的空白时间不录像,可减少大量的无效数据,降低存储空间需求,更高效、更有针对性地对汽车进行录像。