
改进的单轴旋转SINS初始对准方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

改进的单轴旋转SINS初始对准方法.docx
改进的单轴旋转SINS初始对准方法改进的单轴旋转SINS初始对准方法摘要:初始对准是惯性导航系统(InertialNavigationSystem,INS)中至关重要的一个步骤,而单轴旋转初始对准是其中的一种经典方法。本论文基于对传统单轴旋转初始对准方法的分析,提出了一种改进方法。该方法在保留经典方法优势的同时,一定程度上解决了其存在的问题,并通过实验验证了其有效性。关键词:惯性导航系统,初始对准,单轴旋转,改进方法一、引言单轴旋转初始对准是一种常用的惯性导航系统初始对准方法。传统的单轴旋转初始对准方法通

单轴旋转捷联惯导系统初始对准误差分析.docx
单轴旋转捷联惯导系统初始对准误差分析导言捷联惯导系统是一种高精度、高可靠性的惯性导航系统,其中单轴旋转捷联惯导系统是其中最基本的一种。尽管这种系统结构简单,但是仍然存在一些误差影响其导航精度。本文将对单轴旋转捷联惯导系统的初始对准误差进行分析,并探讨如何降低这些误差。一、单轴旋转捷联惯导系统结构首先,介绍单轴旋转捷联惯导系统的结构。如图1所示,该系统由一个陀螺仪和一个加速度计组成。陀螺仪通常采用测量匀速旋转的陀螺轴角速度的方式来计算姿态角,加速度计则用来补偿重力加速度对计算结果的影响。当陀螺轴绕系统的一个
卫星导航辅助SINS进行初始方位对准的方法及装置.pdf
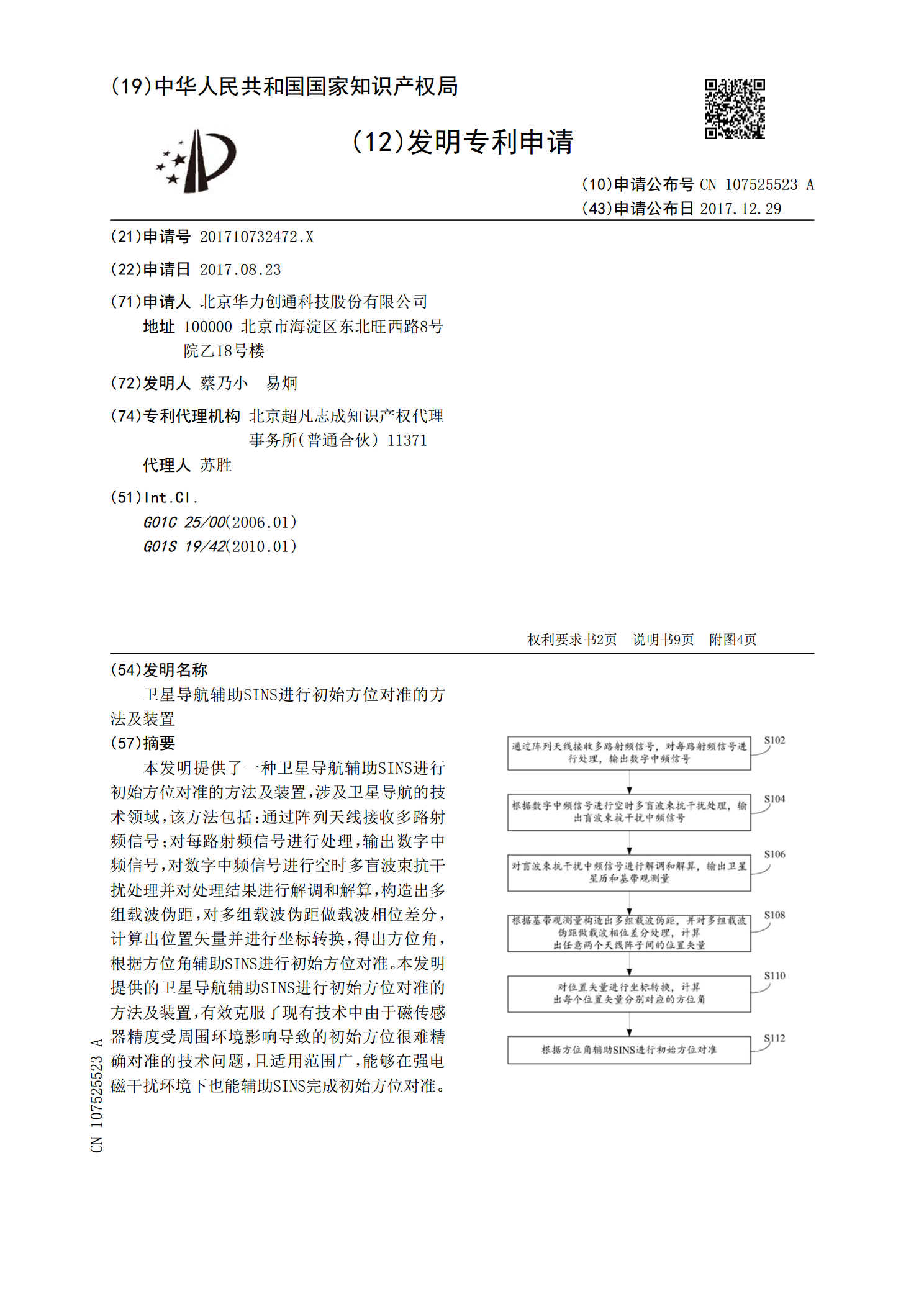
本发明提供了一种卫星导航辅助SINS进行初始方位对准的方法及装置,涉及卫星导航的技术领域,该方法包括:通过阵列天线接收多路射频信号;对每路射频信号进行处理,输出数字中频信号,对数字中频信号进行空时多盲波束抗干扰处理并对处理结果进行解调和解算,构造出多组载波伪距,对多组载波伪距做载波相位差分,计算出位置矢量并进行坐标转换,得出方位角,根据方位角辅助SINS进行初始方位对准。本发明提供的卫星导航辅助SINS进行初始方位对准的方法及装置,有效克服了现有技术中由于磁传感器精度受周围环境影响导致的初始方位很难精确对

粒子滤波方法在SINS初始对准中的应用研究.docx
粒子滤波方法在SINS初始对准中的应用研究摘要:惯性导航系统的初始对准是导航系统正确工作的重要前提。本文研究了粒子滤波在惯性导航系统初始对准中的应用。通过对SINS初始对准的原理和方法进行分析,提出了一种新的基于粒子滤波的SINS初始对准方法。将随机游走模型引入到粒子滤波中,并利用IMU输出测量数据作为滤波器输入,得到了更加准确的姿态解算结果。仿真结果表明,该方法具有良好的初始对准精度和鲁棒性,能够满足实际应用需求。关键词:惯性导航系统;初始对准;粒子滤波;随机游走模型;姿态解算;1.引言惯性导航系统(S

一种小型化SINS的初始对准方法研究.pptx
汇报人:/目录01SINS小型化的意义SINS小型化的应用场景SINS小型化的技术挑战02初始对准方法的重要性常用初始对准方法介绍新型初始对准方法的提出03算法原理算法实现流程算法优势与局限性04实验设置与条件实验结果展示结果分析05研究成果总结对未来研究的建议与展望汇报人: