
基于回波信号的环视SAR成像运动参数估计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于回波信号的环视SAR成像运动参数估计.docx
基于回波信号的环视SAR成像运动参数估计基于回波信号的环视SAR成像运动参数估计摘要:合成孔径雷达(SAR)是一种通过接收目标回波信号来生成高分辨率地图的无源成像雷达技术。在SAR成像过程中,目标和平台的运动参数是重要的影响因素。然而,由于外部干扰以及目标自身运动造成的多普勒频移,准确估计运动参数一直是一个具有挑战性的任务。本文提出了一种基于回波信号的环视SAR成像运动参数估计方法,通过分析回波信号的多普勒频移特征来估计目标和平台的运动参数。实验结果表明,该方法可以准确估计目标和平台的运动参数,为SAR成

基于子孔径参数估计的SAR地面运动目标成像方法.pdf
本发明属于雷达技术领域,公开了基于子孔径参数估计的SAR地面运动目标成像方法。该方法包括:基于全孔径CPI内目标机动运动,子孔径CPI内目标匀速运动的假设,将原始回波数据分为子孔径回波数据并建立全孔径瞬时斜距模型与子孔径距离频域回波数据模型,估计子孔径回波数据参数,利用回波数据参数计算全孔径瞬时多普勒频率向量;利用全孔径瞬时斜距模型得到全孔径瞬时多普勒频率向量模型,将瞬时多普勒频率向量代入瞬时多普勒频率向量模型,求解待定系数,进而利用待定系数校正运动目标全孔径原始回波数据的高阶相位误差,从而大大提高了大斜

基于星载SAR回波的海面运动舰船检测及参数估计研究的开题报告.docx
基于星载SAR回波的海面运动舰船检测及参数估计研究的开题报告一、选题背景海洋是地球上最大的水文系统之一,其覆盖面积和水量都占据着重要的地位,而海面运动是海洋中非常普遍的现象,与海洋环境、天气预测、海运航行等有着密切的关系。目前海面运动检测及相关参数估计技术已相对成熟,其中基于星载SAR的海面运动舰船检测及参数估计技术因具有成本低、覆盖范围广、实时性强等优势,逐渐成为研究热点。二、选题意义(1)海面运动的研究对应用于海上航行、海洋资源开发、环境监测、灾害预警等领域具有重要的意义。相对于传统的海洋观测方法,利

基于稀疏信号表示的水下目标回波参数估计.docx
基于稀疏信号表示的水下目标回波参数估计基于稀疏信号表示的水下目标回波参数估计摘要:水下目标回波参数的估计在水下声学信号处理中具有重要的意义。传统的估计方法往往面临着噪声干扰和复杂的目标场景下的挑战。针对这些问题,本文提出了一种基于稀疏信号表示的水下目标回波参数估计方法。该方法通过引入稀疏表示理论,利用目标信号在特定基下的稀疏性来进行目标回波参数的估计,从而实现了对水下目标回波信号的准确分析与识别。关键词:稀疏信号表示;水下目标回波;参数估计;信号处理;稀疏性1.引言水下目标回波参数的准确估计是水下声学信号
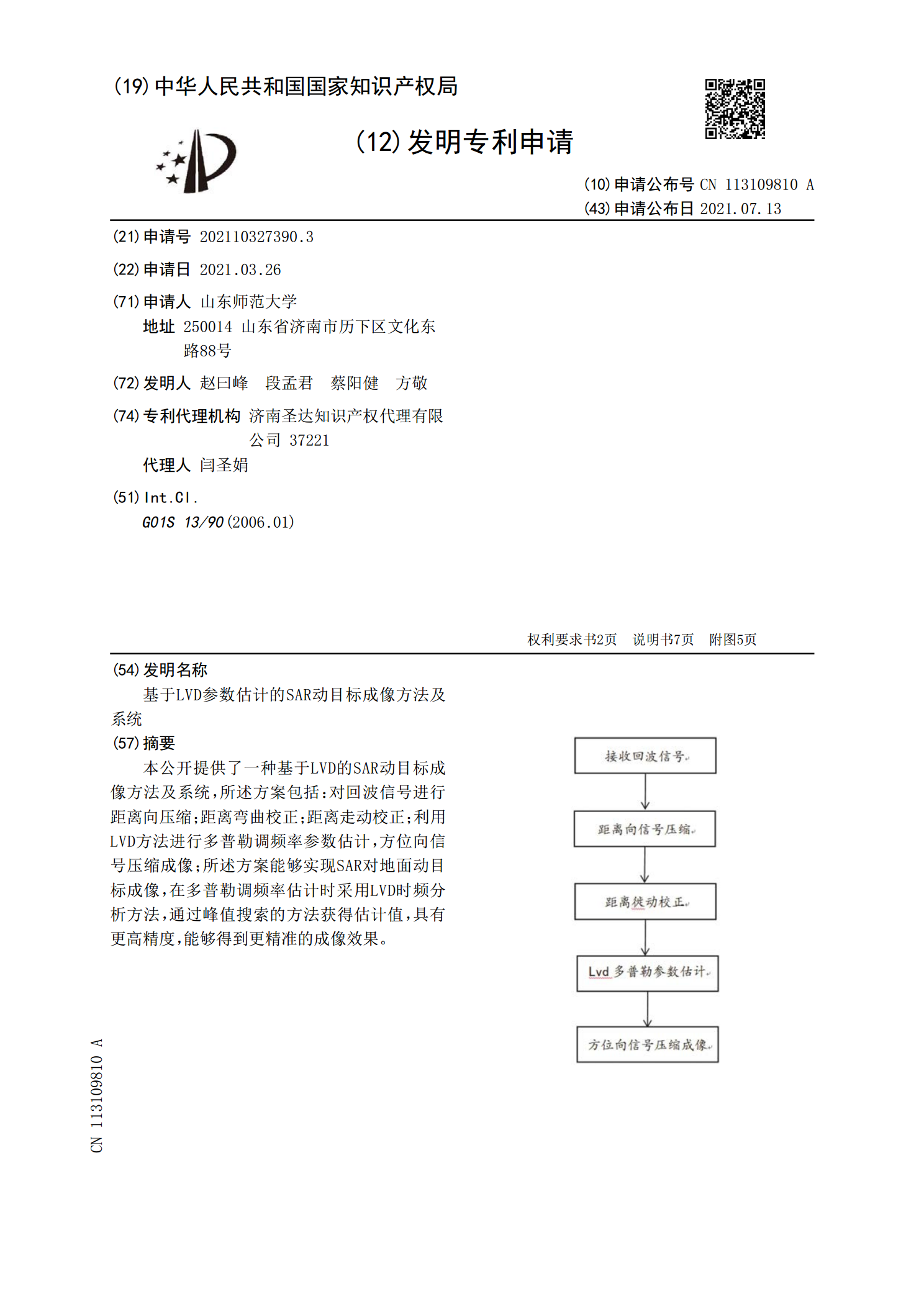
基于LVD参数估计的SAR动目标成像方法及系统.pdf
本公开提供了一种基于LVD的SAR动目标成像方法及系统,所述方案包括:对回波信号进行距离向压缩;距离弯曲校正;距离走动校正;利用LVD方法进行多普勒调频率参数估计,方位向信号压缩成像;所述方案能够实现SAR对地面动目标成像,在多普勒调频率估计时采用LVD时频分析方法,通过峰值搜索的方法获得估计值,具有更高精度,能够得到更精准的成像效果。