
基于三维重构的空间目标进动参数估计方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于三维重构的空间目标进动参数估计方法.docx
基于三维重构的空间目标进动参数估计方法基于三维重构的空间目标进动参数估计方法摘要:随着三维重构技术的快速发展,在许多应用领域,如机器人导航、虚拟现实和增强现实中,对空间目标的进动参数估计变得越来越重要。本文提出了一种基于三维重构的空间目标进动参数估计方法。该方法通过构建三维目标模型,利用传感器获取的点云数据进行三维重构,并通过迭代算法估计目标的进动参数。实验结果表明,所提出的方法能够有效地估计空间目标的进动参数,具有良好的准确性和稳定性。关键词:三维重构;进动参数;目标模型;点云数据;迭代算法引言随着计算

基于HRRP序列的空间进动目标参数估计方法.docx
基于HRRP序列的空间进动目标参数估计方法基于HRRP序列的空间进动目标参数估计方法摘要:空间进动目标参数估计是雷达信号处理中的一个重要问题,对于目标识别、跟踪以及打击等应用具有至关重要的意义。本论文针对基于高分辨率距离剖面(HRRP)序列的空间进动目标参数估计方法进行研究,提出了一种综合利用时频分析和机器学习的新型估计方法。该方法首先利用时频分析技术对HRRP序列进行分析,得到目标的时变特征。然后,结合机器学习算法,通过训练样本集的学习,得到目标的空间进动参数。实验结果表明,该方法能够准确地估计目标的空
基于进动特征提取的空间锥体目标ISAR三维成像方法.pdf
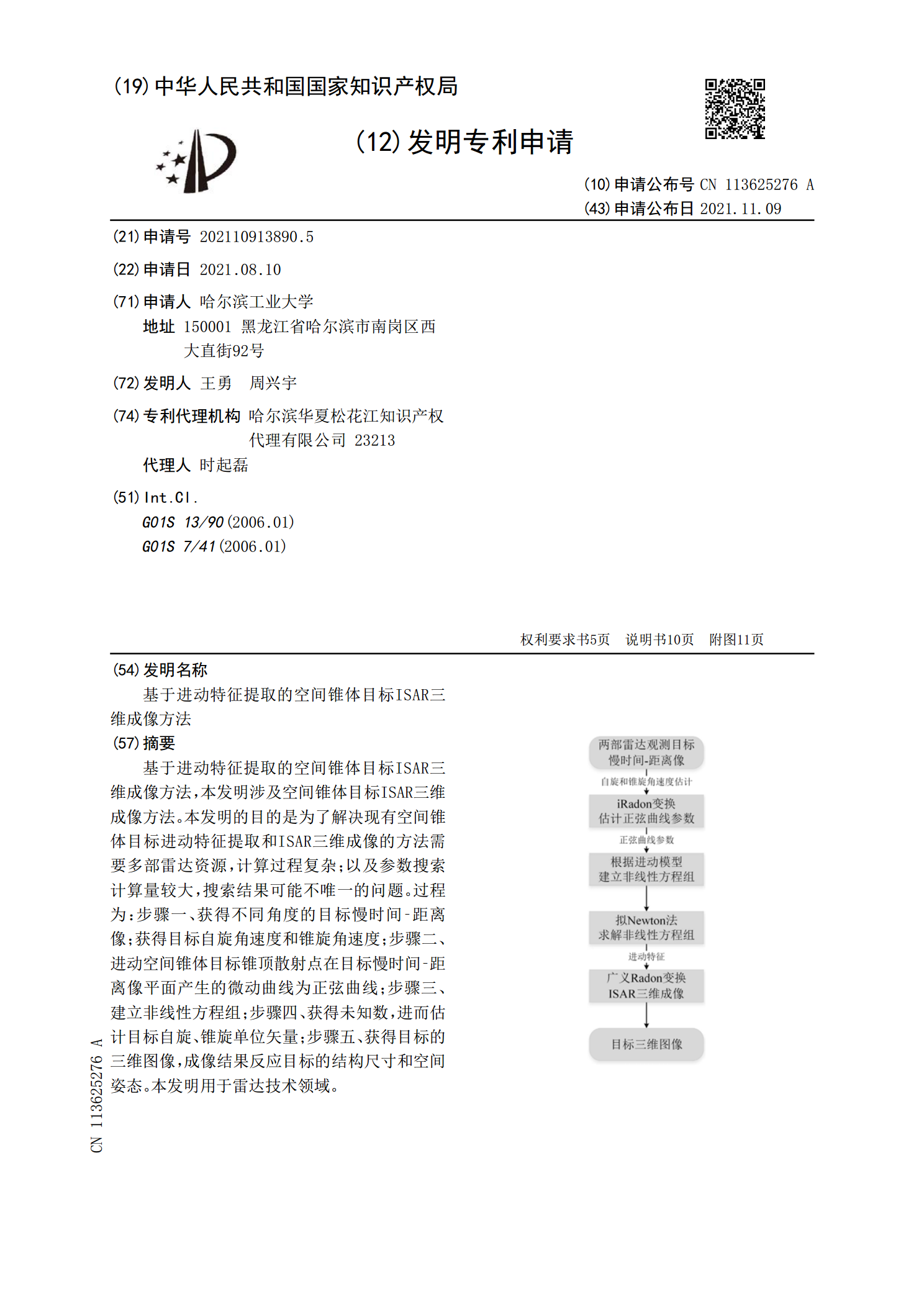
基于进动特征提取的空间锥体目标ISAR三维成像方法,本发明涉及空间锥体目标ISAR三维成像方法。本发明的目的是为了解决现有空间锥体目标进动特征提取和ISAR三维成像的方法需要多部雷达资源,计算过程复杂;以及参数搜索计算量较大,搜索结果可能不唯一的问题。过程为:步骤一、获得不同角度的目标慢时间‑距离像;获得目标自旋角速度和锥旋角速度;步骤二、进动空间锥体目标锥顶散射点在目标慢时间‑距离像平面产生的微动曲线为正弦曲线;步骤三、建立非线性方程组;步骤四、获得未知数,进而估计目标自旋、锥旋单位矢量;步骤五、获得目

基于微多普勒频率的进动锥体目标的几何参数估计方法.pdf
本发明公开了一种基于微多普勒频率的进动锥体目标的几何参数估计方法。对圆锥弹头目标进行建模,计算目标在全姿态角下的回波数据;对得到的全姿态角下的回波数据采用插值拟合的方法构造出进动锥体目标的回波电场数值;对回波电场数值进行短时傅里叶变换,得到进动锥体目标的时频分布结果;分别提取进动锥体目标中的时频分布结果中的锥顶时频脊线和锥底时频脊线;通过进动锥体目标的锥顶和锥底微多普勒频率表达式,推导出待估计参数质心到锥顶距离L、质心到锥底中心的距离h、锥底半径r和进动角θ的关系;通过数值关系匹配的方法估计进动角θ、质心

基于微多普勒的锥体目标进动和结构参数估计.docx
基于微多普勒的锥体目标进动和结构参数估计基于微多普勒的锥体目标进动和结构参数估计摘要:在弧长段微多普勒目标特征提取领域,锥体目标是一种常见的目标类型。为了精确地估计锥体目标的进动和结构参数,本文提出了一种基于微多普勒的方法。首先,通过微多普勒频谱分析,提取出目标的微多普勒频谱特征。然后,利用最小二乘法,估计目标的进动参数。最后,通过结构参数估计,获取目标的结构信息。实验结果表明,所提出的方法可以准确地估计锥体目标的进动和结构参数,对于弧长段微多普勒目标的分析具有重要的应用价值。关键词:微多普勒,锥体目标,