
基于无线传感器网络的AGV移动路径规划方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于无线传感器网络的AGV移动路径规划方法.docx
基于无线传感器网络的AGV移动路径规划方法基于无线传感器网络的AGV移动路径规划方法摘要:AGV(AutomatedGuidedVehicle)是一种自动导引车辆,广泛应用于物流仓储、制造业等领域。针对AGV在复杂环境下的移动路径规划问题,本文提出了一种基于无线传感器网络的AGV移动路径规划方法。该方法利用无线传感器网络获取环境信息,并采用启发式搜索算法进行路径规划,从而实现AGV的高效移动。关键词:AGV;无线传感器网络;路径规划;启发式搜索算法1.引言AGV技术的快速发展带来了工业自动化领域的变革,它

无线传感器网络移动节点路径规划方法仿真.docx
无线传感器网络移动节点路径规划方法仿真无线传感器网络是由大量分布在监测区域内的传感器节点组成的自组织网络,用于感知和收集环境中的各种信息。随着无线传感器节点的增加和技术的进步,移动节点路径规划成为提高网络性能和应用效果的关键技术之一。本论文将介绍无线传感器网络移动节点路径规划的方法以及相关仿真实验的设计和结果。1.引言无线传感器网络中的传感器节点通常是固定部署的,因此节点路径规划是相对简单的。然而,移动节点具有更高的灵活性和可调度性,可以根据实际需求进行自主移动和路径规划。移动节点路径规划可以实现以下目标
无线传感器网络中移动数据收集器的移动路径规划方法.pdf
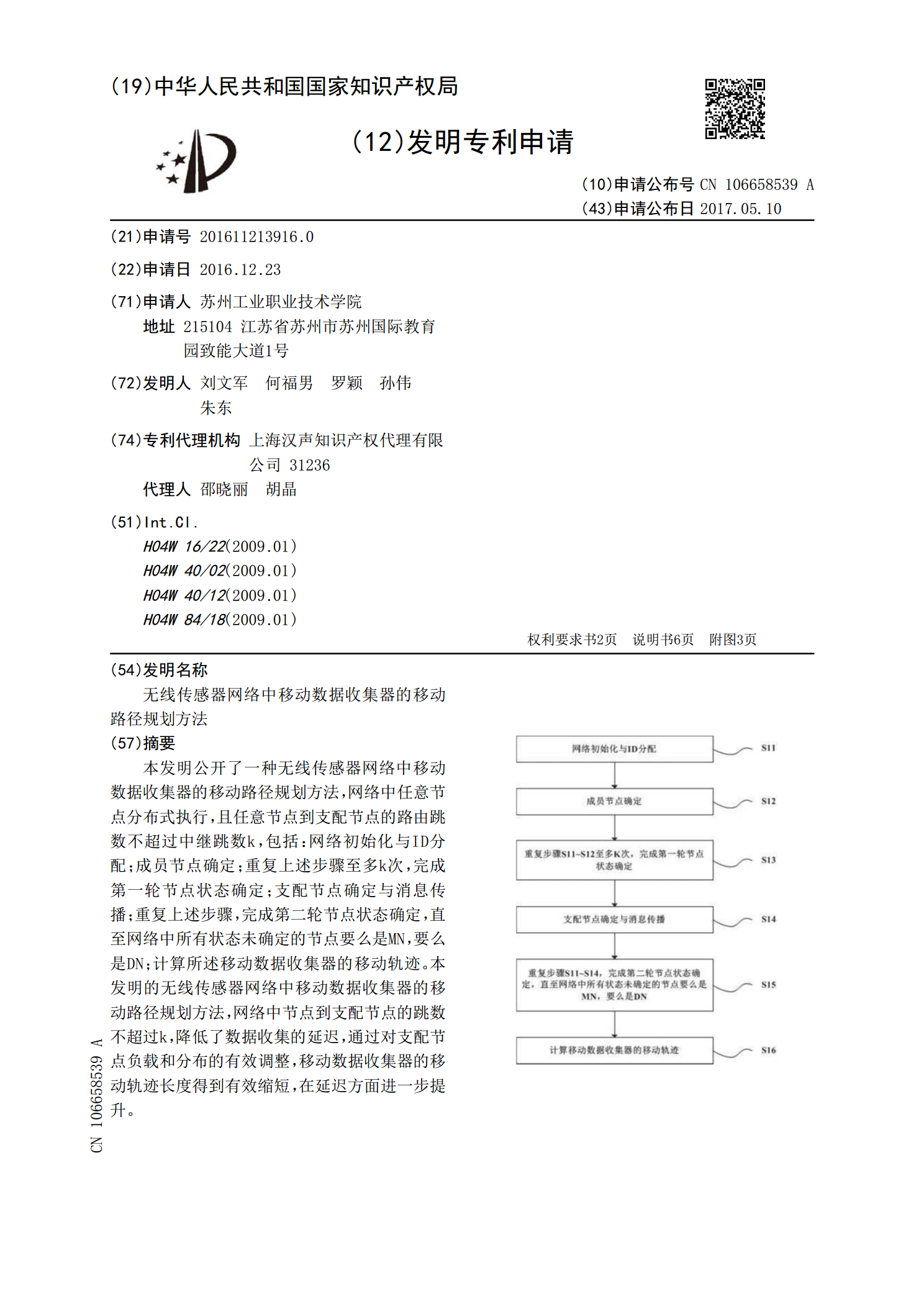
本发明公开了一种无线传感器网络中移动数据收集器的移动路径规划方法,网络中任意节点分布式执行,且任意节点到支配节点的路由跳数不超过中继跳数k,包括:网络初始化与ID分配;成员节点确定;重复上述步骤至多k次,完成第一轮节点状态确定;支配节点确定与消息传播;重复上述步骤,完成第二轮节点状态确定,直至网络中所有状态未确定的节点要么是MN,要么是DN;计算所述移动数据收集器的移动轨迹。本发明的无线传感器网络中移动数据收集器的移动路径规划方法,网络中节点到支配节点的跳数不超过k,降低了数据收集的延迟,通过对支配节点负

基于Halin图的无线传感器网络移动节点路径规划算法研究.pptx
汇报人:/目录0102Halin图的基本概念和特性无线传感器网络的应用和挑战路径规划在无线传感器网络中的重要性03算法设计思路和目标算法的主要步骤和流程算法的时间复杂度和空间复杂度分析04算法实现的环境和工具实验数据集的介绍和预处理实验验证的过程和结果分析实验结果与现有算法的对比和分析05算法的优点和亮点算法的不足和局限性对算法的改进方向和建议06对论文工作的总结和回顾对未来研究的展望和计划汇报人:

基于遗传算法对无线传感器网络移动充电路径规划的研究.docx
基于遗传算法对无线传感器网络移动充电路径规划的研究随着无线传感器网络技术的不断发展与完善,其在现代社会中的应用不断扩大,然而网络中的节点能源是一个非常重要的问题,充电问题直接影响着传感器节点的生存时间和工作性能。为解决这一问题,移动充电无线传感器网络得到了广泛的研究。其中,路径规划算法的优化成为了当前研究的重点。本文基于遗传算法,着重探讨了无线传感器网络移动充电路径规划的研究。一、移动充电无线传感器网络简介移动充电无线传感器网络是传感器网络技术发展的一个新领域,主要解决的问题是如何充分利用移动充电节点的能