
柔性表面爬行机器人.pdf

含平****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

柔性表面爬行机器人.pdf
本发明涉及一种柔性表面爬行机器人,其包括:爪子,具有成对设置的夹紧轮,所述夹紧轮上分别连接有驱动所述夹紧轮转动的电机,所述成对设置的夹紧轮的转动的轮面相对设置;及左右摆动机构,一端与所述爪子连接,所述左右摆动机构在一第一平面内摆动并带动所述爪子跟随所述左右摆动机构进行运动;前后摆动机构,与所述左右摆动机构连接并在一第二平面内摆动,所述第二平面与所述第一平面彼此相交。上述柔性表面爬行机器人的爪子包含有成对设置的夹紧轮,通过夹紧轮可夹住柔性材料,能在垂直柔性表面爬行,由于设置了前后摆动机构,能在爬行过程中调整

柔性表面爬行机器人.pdf
本发明揭露了一种柔性表面爬行机器人,其包括固定件、位于所述固定件一侧的一对第一夹紧轮、与所述第一夹紧轮相对且位于所述固定件另一侧的一对第二夹紧轮、驱动所述第一夹紧轮转动的第一电机及驱动所述第二夹紧轮转动的第二电机。通过两对夹紧轮夹持被爬行物工作,使柔性表面爬行机器人爬行方向与被夹紧处的柔性物的弯折处会形成的直线相垂直,大大克服了柔性表面爬行机器人脱离被爬行物的风险。
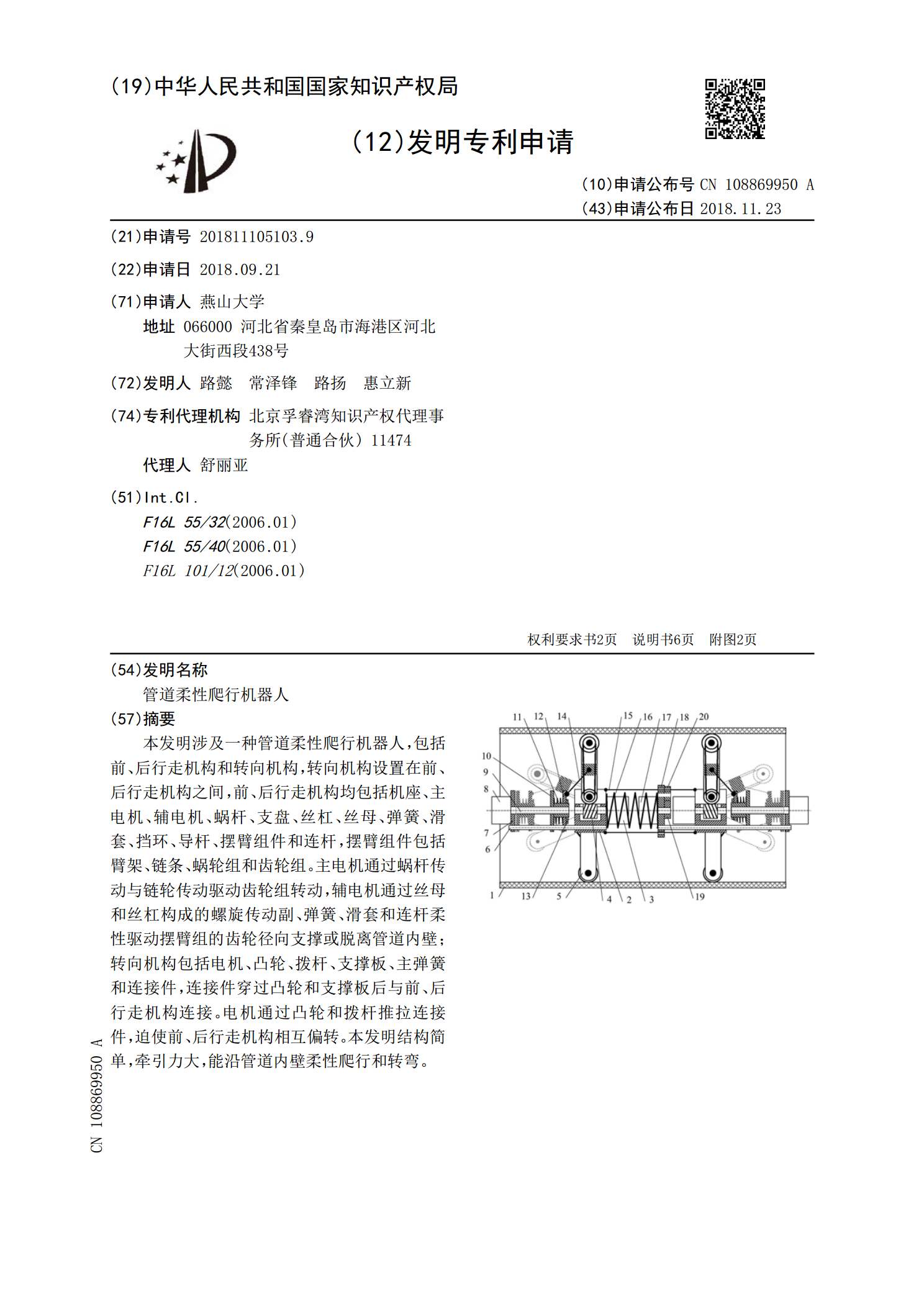
管道柔性爬行机器人.pdf
本发明涉及一种管道柔性爬行机器人,包括前、后行走机构和转向机构,转向机构设置在前、后行走机构之间,前、后行走机构均包括机座、主电机、辅电机、蜗杆、支盘、丝杠、丝母、弹簧、滑套、挡环、导杆、摆臂组件和连杆,摆臂组件包括臂架、链条、蜗轮组和齿轮组。主电机通过蜗杆传动与链轮传动驱动齿轮组转动,辅电机通过丝母和丝杠构成的螺旋传动副、弹簧、滑套和连杆柔性驱动摆臂组的齿轮径向支撑或脱离管道内壁;转向机构包括电机、凸轮、拨杆、支撑板、主弹簧和连接件,连接件穿过凸轮和支撑板后与前、后行走机构连接。电机通过凸轮和拨杆推拉连
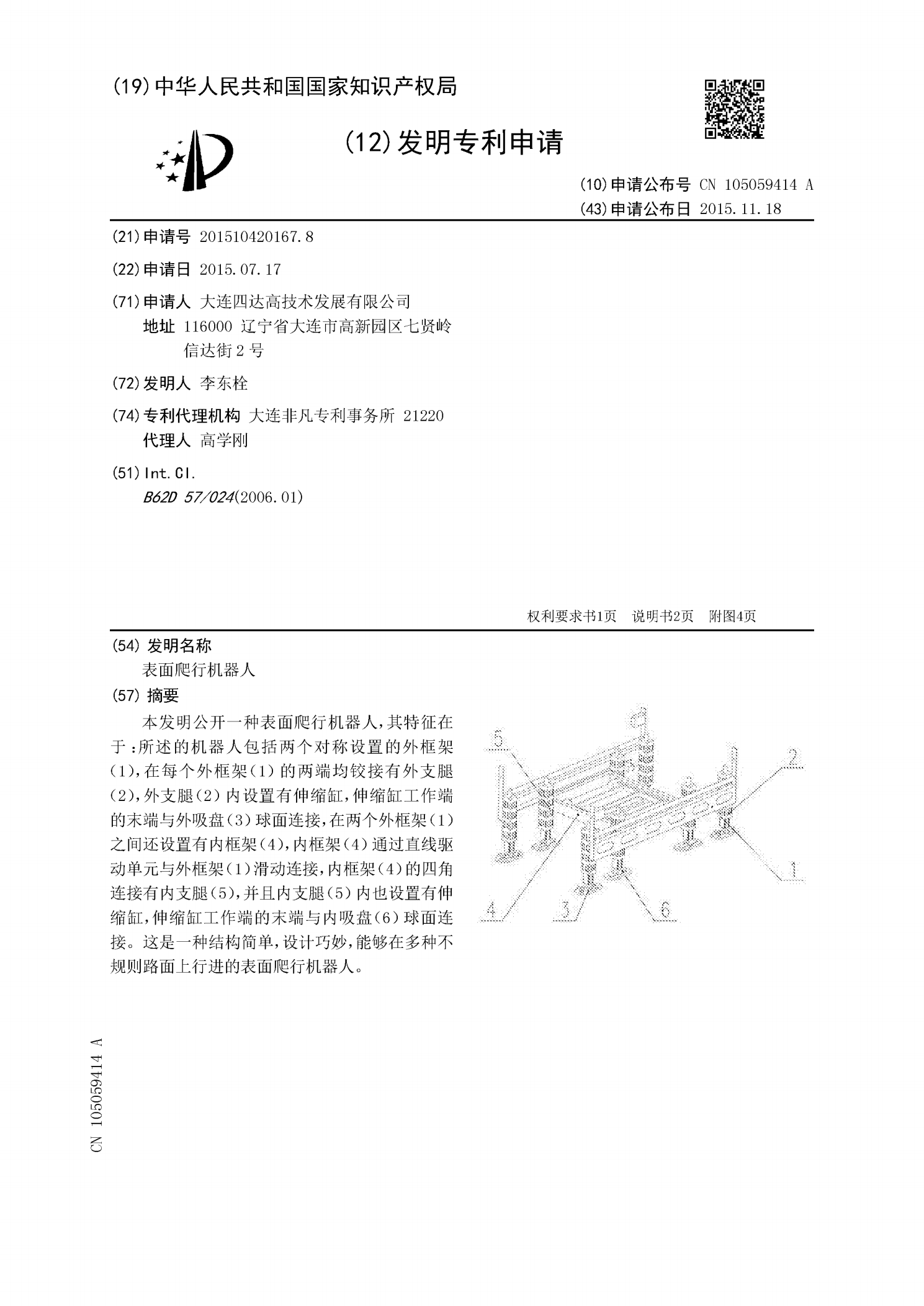
表面爬行机器人.pdf
本发明公开一种表面爬行机器人,其特征在于:所述的机器人包括两个对称设置的外框架(1),在每个外框架(1)的两端均铰接有外支腿(2),外支腿(2)内设置有伸缩缸,伸缩缸工作端的末端与外吸盘(3)球面连接,在两个外框架(1)之间还设置有内框架(4),内框架(4)通过直线驱动单元与外框架(1)滑动连接,内框架(4)的四角连接有内支腿(5),并且内支腿(5)内也设置有伸缩缸,伸缩缸工作端的末端与内吸盘(6)球面连接。这是一种结构简单,设计巧妙,能够在多种不规则路面上行进的表面爬行机器人。
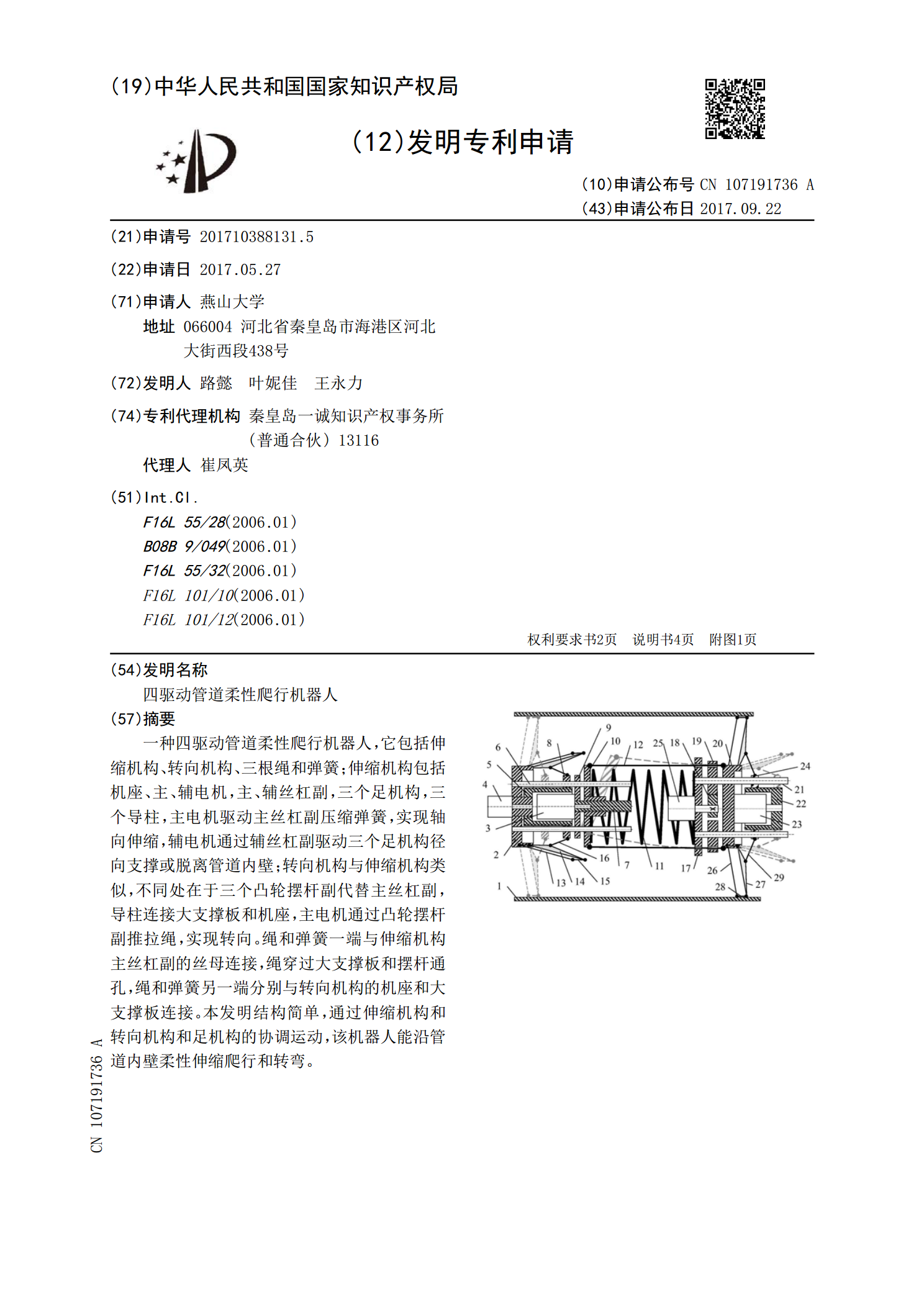
四驱动管道柔性爬行机器人.pdf
一种四驱动管道柔性爬行机器人,它包括伸缩机构、转向机构、三根绳和弹簧;伸缩机构包括机座、主、辅电机,主、辅丝杠副,三个足机构,三个导柱,主电机驱动主丝杠副压缩弹簧,实现轴向伸缩,辅电机通过辅丝杠副驱动三个足机构径向支撑或脱离管道内壁;转向机构与伸缩机构类似,不同处在于三个凸轮摆杆副代替主丝杠副,导柱连接大支撑板和机座,主电机通过凸轮摆杆副推拉绳,实现转向。绳和弹簧一端与伸缩机构主丝杠副的丝母连接,绳穿过大支撑板和摆杆通孔,绳和弹簧另一端分别与转向机构的机座和大支撑板连接。本发明结构简单,通过伸缩机构和转向