
基于TRIZ的凸轮夹紧机构定位不准解决方案的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于TRIZ的凸轮夹紧机构定位不准解决方案的研究.docx
基于TRIZ的凸轮夹紧机构定位不准解决方案的研究摘要本论文基于TRIZ理论,针对凸轮夹紧机构定位不准问题进行研究。首先分析了凸轮夹紧机构的原理和产生定位不准的原因,然后运用TRIZ的思维模式和工具,深入分析问题,寻找创新解决方案。最终提出了基于光电编码器的精确定位方案,该方案能够实现高精度夹紧,实现了凸轮夹紧机构的优化设计,具有一定的理论与实践价值。关键词:TRIZ;凸轮夹紧机构;定位不准;光电编码器;创新解决方案。一、引言凸轮夹紧机构是一种常用于机械加工中的夹紧装置,具有结构简单,使用方便等优点。然而,

凸轮吸取夹紧定位机构.pdf
本发明公开了一种凸轮吸取夹紧定位机构,包括微型抓头、气缸安装板和固定在气缸安装板上的气缸,气缸下连接有导轨安装板;所述气缸安装板下设有固定板,固定板下设置有吸盘连接杆,吸盘连接杆上设有吸盘;所述气缸安装板与固定板之间连接固定有底板、凸轮轴导向板和两块连接板,底板与凸轮轴导向板对称设置,所述凸轮轴导向板上开有导向滑槽;所述底板上固定有直线导轨,所述导轨安装板设置于直线导轨上,导轨安装板上对称设有微型滑轨,微型滑轨上设有微型滑块,所述微型抓头一端固定在微型滑块上,微型抓头固定有凸轮从动轴承。通过上述方式,本发
凸轮夹紧机构.pdf
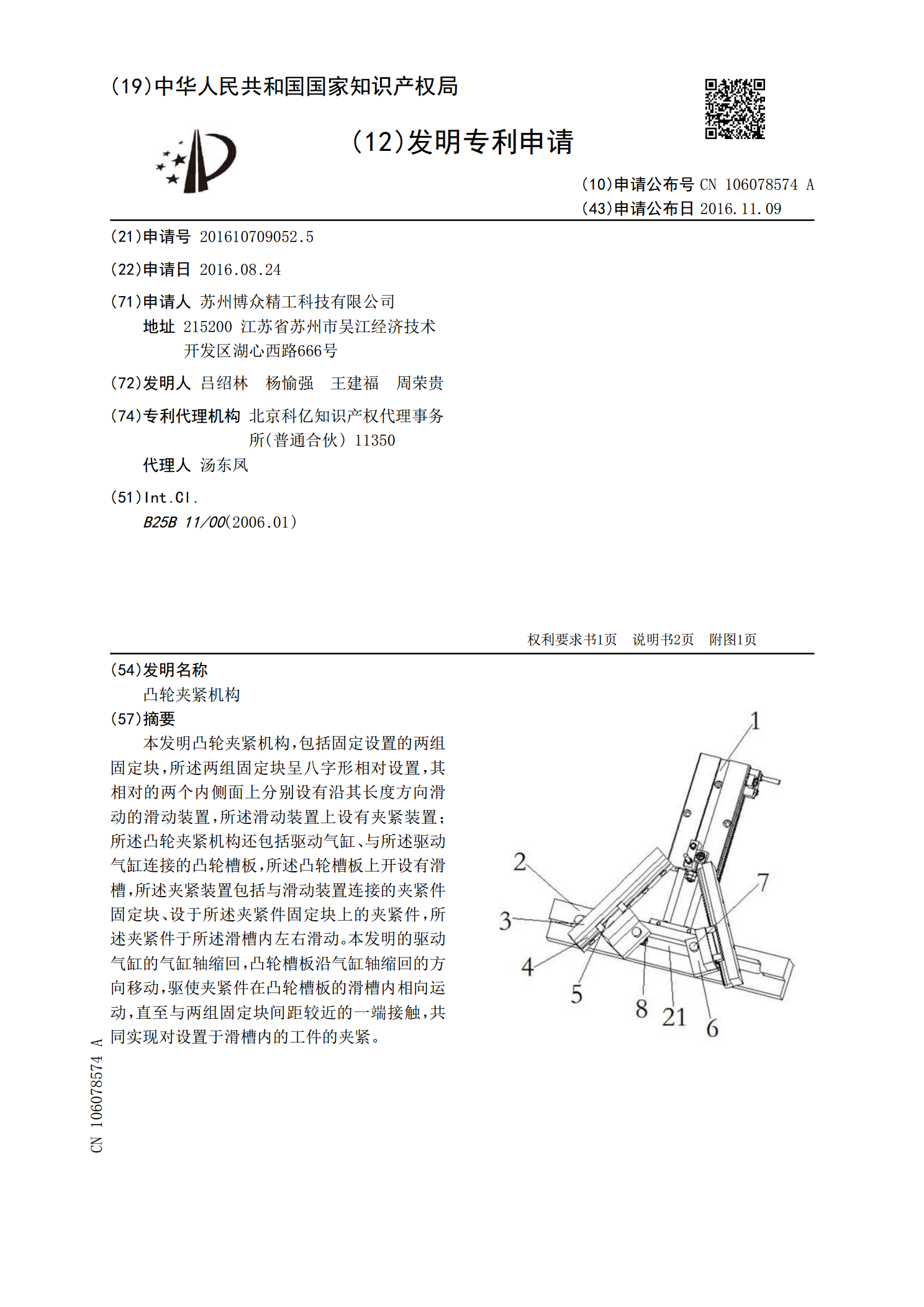
本发明凸轮夹紧机构,包括固定设置的两组固定块,所述两组固定块呈八字形相对设置,其相对的两个内侧面上分别设有沿其长度方向滑动的滑动装置,所述滑动装置上设有夹紧装置;所述凸轮夹紧机构还包括驱动气缸、与所述驱动气缸连接的凸轮槽板,所述凸轮槽板上开设有滑槽,所述夹紧装置包括与滑动装置连接的夹紧件固定块、设于所述夹紧件固定块上的夹紧件,所述夹紧件于所述滑槽内左右滑动。本发明的驱动气缸的气缸轴缩回,凸轮槽板沿气缸轴缩回的方向移动,驱使夹紧件在凸轮槽板的滑槽内相向运动,直至与两组固定块间距较近的一端接触,共同实现对设置

滑块凸轮式夹紧机构.pdf
本发明涉及一种夹紧机构,具体涉及一种滑块凸轮式夹紧机构;包括有夹具体、与夹具体滑动连接的水平滑块,夹具体上设有用于抵住工件表面的凸台;水平滑块端部与一凸轮相抵,所述凸轮铰接在夹具体上,所诉凸轮上还设有手柄;水平滑块与夹具体之间设有复位弹簧;采用本发明技术方案的滑块凸轮式夹紧机构,结构简单且成本低。

一种凸轮夹紧机构.pdf
本发明涉及一种凸轮夹紧机构,包括载具、推动拉手、导向机构、凸轮机构和夹紧机构,所述推动拉手滑动设置在载具底部,推动拉手前侧并排设有多个导向机构,每个导向机构上分别设有凸轮机构,推动拉手左端及凸轮机构的前端均设有夹紧机构;所述凸轮机构为箭头状,其顶端为水平状,两侧面为斜端面,推动拉手的前侧边缘开设有与凸轮机构相对应的凹槽,凹槽的右端面为与凸轮机构斜端面相匹配的斜面,凸轮机构通过导向机构使其顶端与对应的凹槽相接触;所述载具顶部开设有用于放置产品的仿形槽。本发明用于对大小不同的产品或载具进行夹紧,大大提高生产效