
基于LMS算法的多传感器数据加权融合方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于LMS算法的多传感器数据加权融合方法.docx
基于LMS算法的多传感器数据加权融合方法基于LMS算法的多传感器数据加权融合方法摘要:多传感器数据融合在现代感知系统中发挥着重要作用,通过结合多个传感器的观测结果,可以获得更准确、更可信的感知结果。然而,由于传感器之间存在不同的量纲、误差、时延等问题,如何有效融合多传感器数据成为了一个具有挑战性的问题。本文提出了一种基于LMS算法的多传感器数据加权融合方法,该方法综合考虑了传感器的权重分配和数据融合过程,具有较好的适应性和实时性。关键词:多传感器数据融合、加权融合、LMS算法、适应性、实时性1.引言多传感

基于TOPSIS的多传感器加权融合改进方法研究.docx
基于TOPSIS的多传感器加权融合改进方法研究论文标题:基于TOPSIS的多传感器加权融合改进方法研究摘要:随着感知技术和传感器技术的不断发展,多传感器融合成为实现高精度感知的重要手段。传统的加权融合方法在选择权重时存在不确定性和主观性的问题,影响了融合结果的准确性和可信度。针对这一问题,本文提出了一种基于TOPSIS的多传感器加权融合改进方法,通过引入TOPSIS方法来自动选择最优权重,提高融合结果的准确性。关键词:多传感器融合;加权融合;TOPSIS;权重选择1.引言随着人们对周围环境信息需求的增加,

基于多传感器的数据融合算法研究.docx
基于多传感器的数据融合算法研究基于多传感器的数据融合算法研究摘要:数据融合是指将来自多个传感器的不同数据源进行整合,以提高系统的性能、可靠性和准确性。随着传感技术和物联网的发展,越来越多的传感器被应用于各种领域,如智能家居、无人驾驶和智能健康等。本文重点研究了基于多传感器的数据融合算法,包括传感器间的数据融合、融合算法的选择以及应用示例。实验结果表明多传感器数据融合算法能够提高系统的性能和准确性。关键词:数据融合、多传感器、算法、性能、准确性1.引言随着科技的不断发展,传感器技术的成熟和物联网的兴起,传感
一种基于加权特征融合的多传感器信息融合方法.pdf
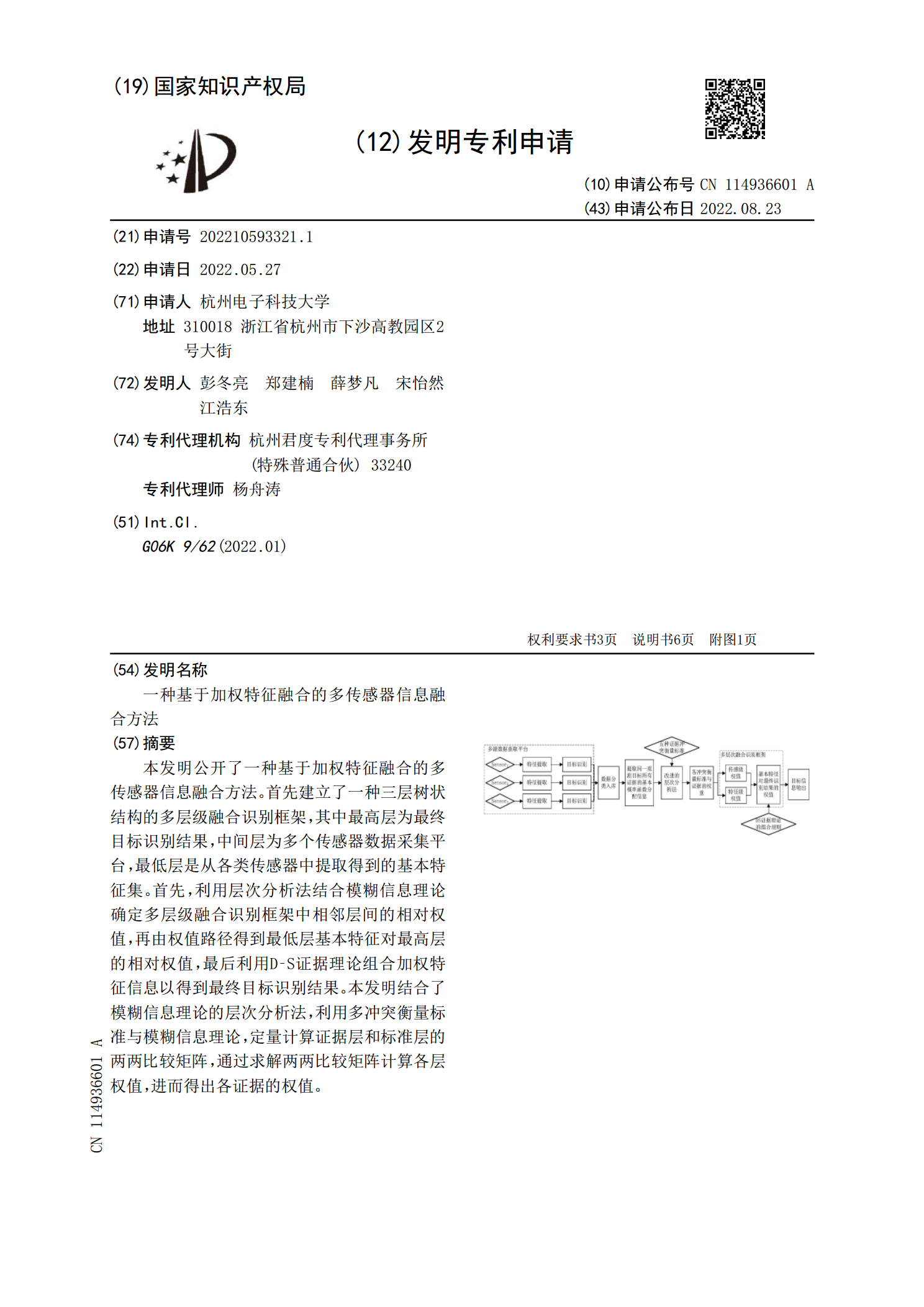
本发明公开了一种基于加权特征融合的多传感器信息融合方法。首先建立了一种三层树状结构的多层级融合识别框架,其中最高层为最终目标识别结果,中间层为多个传感器数据采集平台,最低层是从各类传感器中提取得到的基本特征集。首先,利用层次分析法结合模糊信息理论确定多层级融合识别框架中相邻层间的相对权值,再由权值路径得到最低层基本特征对最高层的相对权值,最后利用D?S证据理论组合加权特征信息以得到最终目标识别结果。本发明结合了模糊信息理论的层次分析法,利用多冲突衡量标准与模糊信息理论,定量计算证据层和标准层的两两比较矩阵

基于切尾加权融合算法的多传感器CCD测量系统.docx
基于切尾加权融合算法的多传感器CCD测量系统多传感器CCD测量系统是一种非常常见的测量系统,其中包括使用多个CCD传感器来捕获物体的三维形状和纹理的信息。使用多个传感器可以提高测量精度和可靠性,但是也带来了数据整合和处理的挑战。本论文将介绍基于切尾加权融合算法的多传感器CCD测量系统,该算法能够有效地融合多个传感器的数据并生成高质量的三维模型。首先,本文将介绍多传感器CCD测量系统的基本原理和组成部分。该系统通常由多个CCD相机、光线投影器、电脑等组成。相机用于捕获物体的图像,光线投影器用于在物体表面上投