
变形轮式爬楼越障机器人分析与设计.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

变形轮式爬楼越障机器人分析与设计.docx
变形轮式爬楼越障机器人分析与设计变形轮式爬楼越障机器人分析与设计摘要:随着科技的不断进步,机器人技术在各个领域有了广泛的应用。机器人的形态多样化使得其能够在不同的环境下执行各种任务。本论文针对变形轮式爬楼越障机器人进行了分析与设计。首先,对机器人的功能需求进行了详细的分析,然后,本文设计了机器人的结构、运动方式以及控制系统,并对机器人进行了性能测试。结果表明,变形轮式爬楼越障机器人具有良好的运动能力和稳定性,能够在不同的环境中执行任务。关键词:机器人、爬楼越障、变形轮、控制系统1.引言机器人技术是现代科技
轮式爬楼越障车.pdf
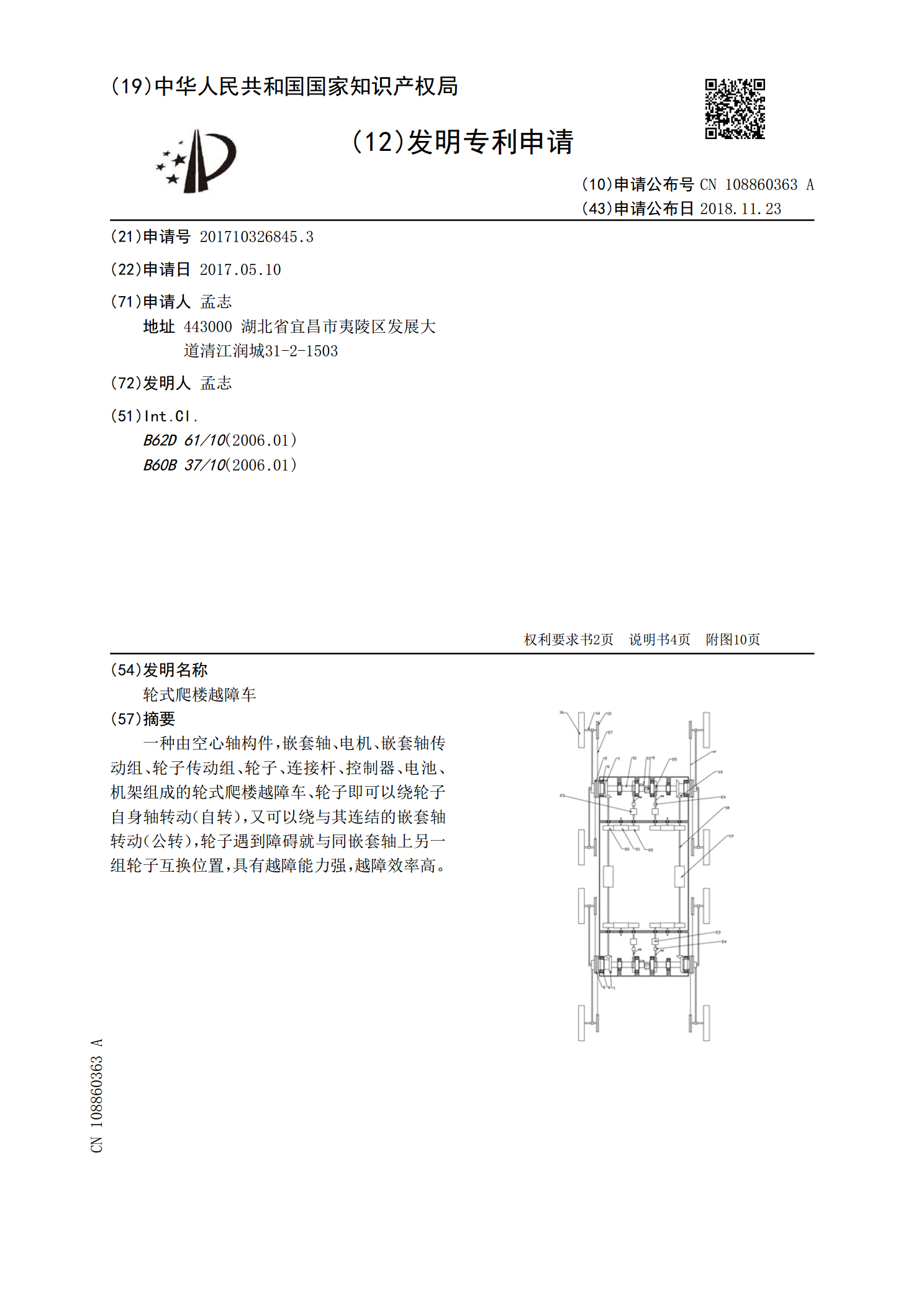
一种由空心轴构件,嵌套轴、电机、嵌套轴传动组、轮子传动组、轮子、连接杆、控制器、电池、机架组成的轮式爬楼越障车、轮子即可以绕轮子自身轴转动(自转),又可以绕与其连结的嵌套轴转动(公转),轮子遇到障碍就与同嵌套轴上另一组轮子互换位置,具有越障能力强,越障效率高。
具有可变形车架结构的轮式越障机器人.pdf
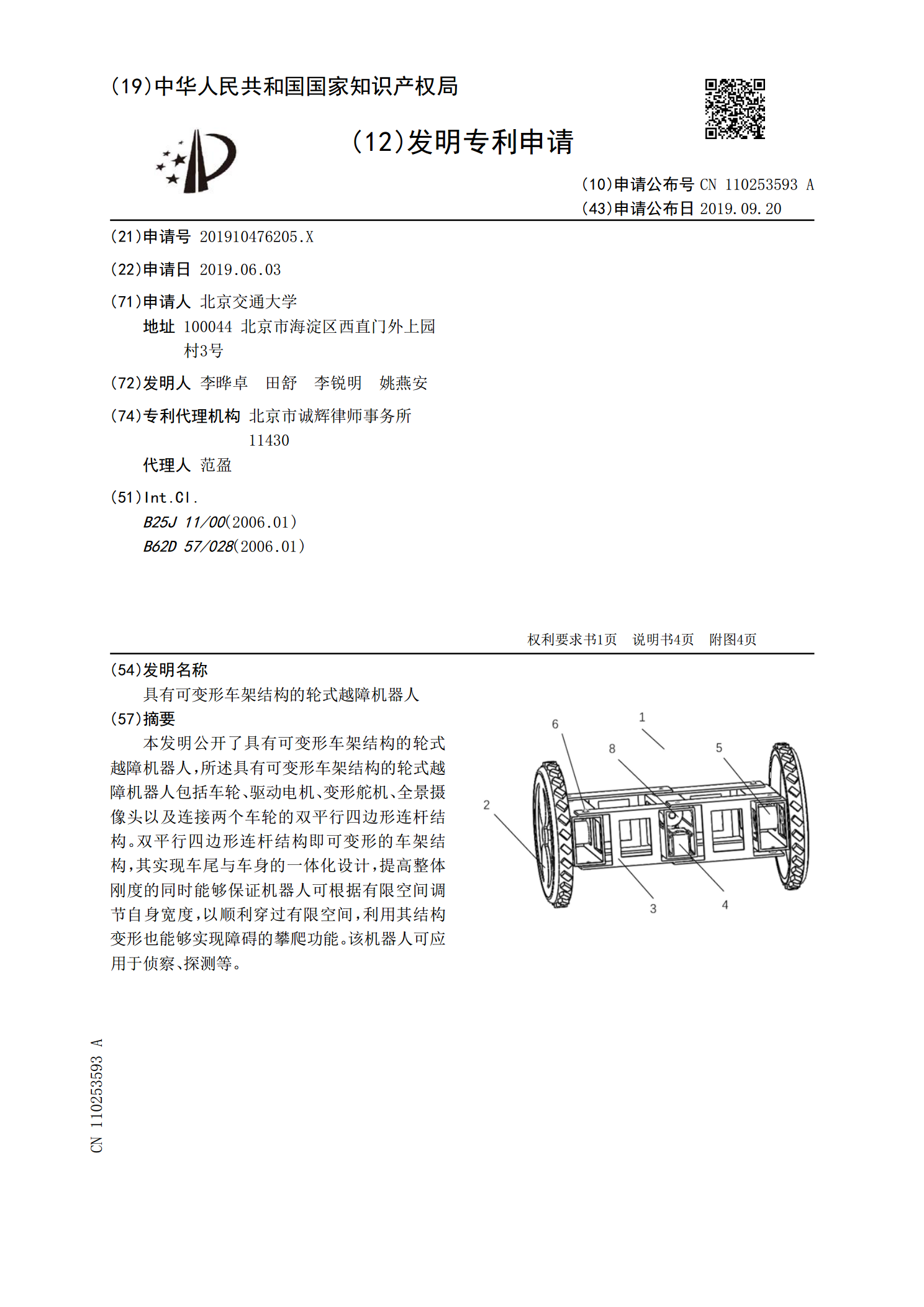
本发明公开了具有可变形车架结构的轮式越障机器人,所述具有可变形车架结构的轮式越障机器人包括车轮、驱动电机、变形舵机、全景摄像头以及连接两个车轮的双平行四边形连杆结构。双平行四边形连杆结构即可变形的车架结构,其实现车尾与车身的一体化设计,提高整体刚度的同时能够保证机器人可根据有限空间调节自身宽度,以顺利穿过有限空间,利用其结构变形也能够实现障碍的攀爬功能。该机器人可应用于侦察、探测等。

一种行星轮式越障机器人爬楼梯控制方法.pdf
本发明公开了一种行星轮式越障机器人爬楼梯控制方法,包括如下步骤:1)保持越障机器人匀速直线前进,测量其同一驱动组中两行星轮组与前方台阶的距离及行星轮组的转速,并计算偏转角;2)计算各行星轮组的理论转速,并使行星轮组以计算得出的转速进行运动;3)检测当前的L
一种欠驱动变形轮式越障机器人.pdf
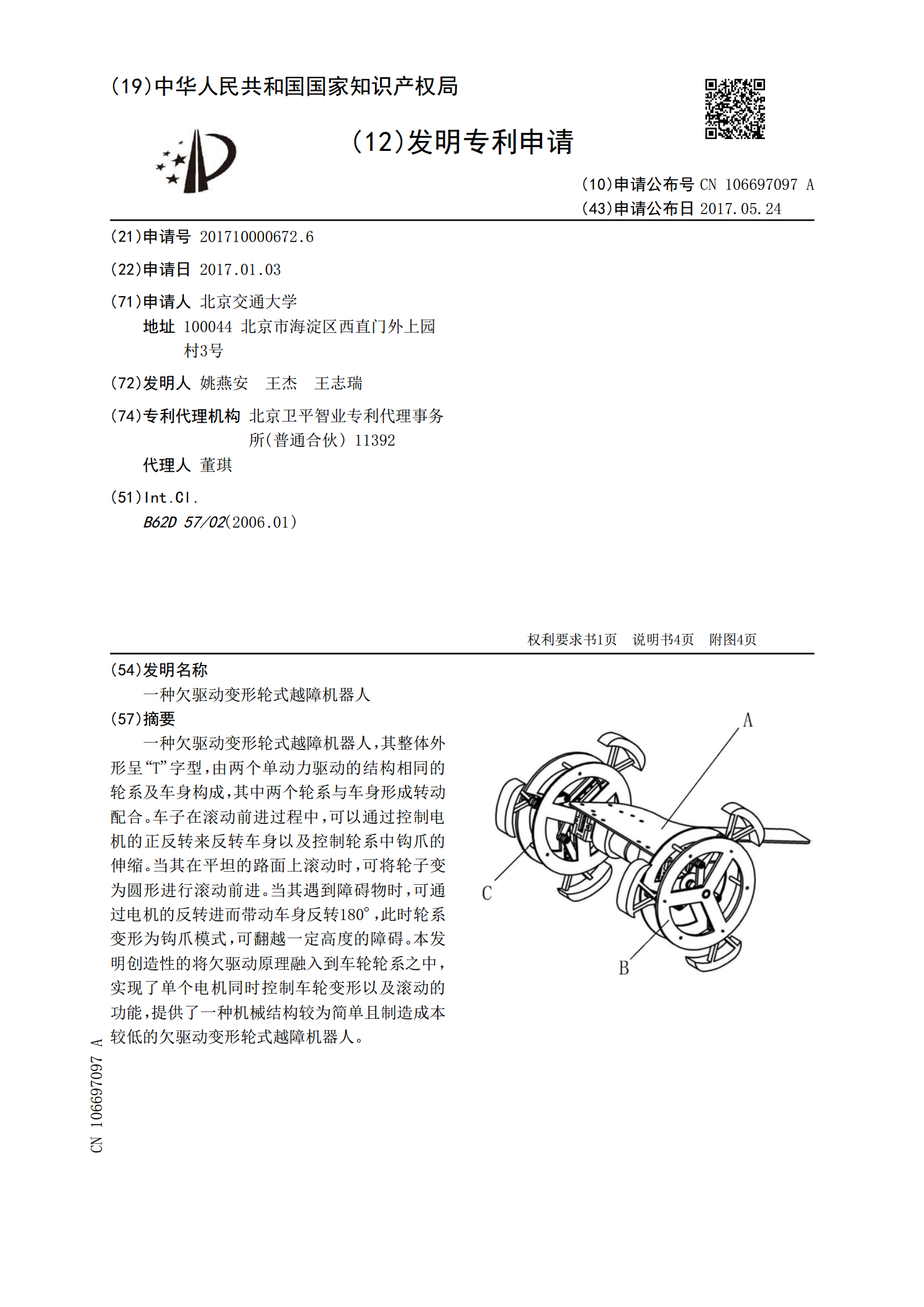
一种欠驱动变形轮式越障机器人,其整体外形呈“T”字型,由两个单动力驱动的结构相同的轮系及车身构成,其中两个轮系与车身形成转动配合。车子在滚动前进过程中,可以通过控制电机的正反转来反转车身以及控制轮系中钩爪的伸缩。当其在平坦的路面上滚动时,可将轮子变为圆形进行滚动前进。当其遇到障碍物时,可通过电机的反转进而带动车身反转180°,此时轮系变形为钩爪模式,可翻越一定高度的障碍。本发明创造性的将欠驱动原理融入到车轮轮系之中,实现了单个电机同时控制车轮变形以及滚动的功能,提供了一种机械结构较为简单且制造成本较低的欠