
变臂关节式坐标测量机的参数自标定方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

变臂关节式坐标测量机的参数自标定方法研究.docx
变臂关节式坐标测量机的参数自标定方法研究标题:变臂关节式坐标测量机的参数自标定方法研究摘要:变臂关节式坐标测量机是一种常用的测量设备,其测量精度直接影响产品质量和生产效率。参数自标定方法是确保测量机准确度的重要手段之一。本论文针对变臂关节式坐标测量机的参数自标定问题进行了研究,提出了一种基于参数识别和优化算法的自标定方法,并在实验中进行了验证。研究结果表明,该方法能够有效提高测量机的准确度和稳定性,具有很高的应用价值。关键词:变臂关节式坐标测量机,参数自标定,参数识别,优化算法引言:随着工业化的发展,测量

关节臂式坐标测量机自标定方法与误差补偿研究.docx
关节臂式坐标测量机自标定方法与误差补偿研究一、引言关节臂式坐标测量机作为一种高精度测量仪器,广泛应用于各领域的尺寸测量、三维重构和质量控制等领域。在测量过程中,关节臂式坐标测量机的标定和误差补偿是保证测量精度的关键。本文将对关节臂式坐标测量机的自标定方法和误差补偿技术进行研究和探讨。二、关节臂式坐标测量机自标定方法在实际使用过程中,为保证测量精度,需要对关节臂式坐标测量机进行定期的标定。关节臂式坐标测量机自标定方法主要有以下两种:1.静态标定方法静态标定方法通常是利用坐标系下数学模型求解出机械臂姿态关系的
一种大尺寸关节臂式坐标测量机的标定方法.pdf
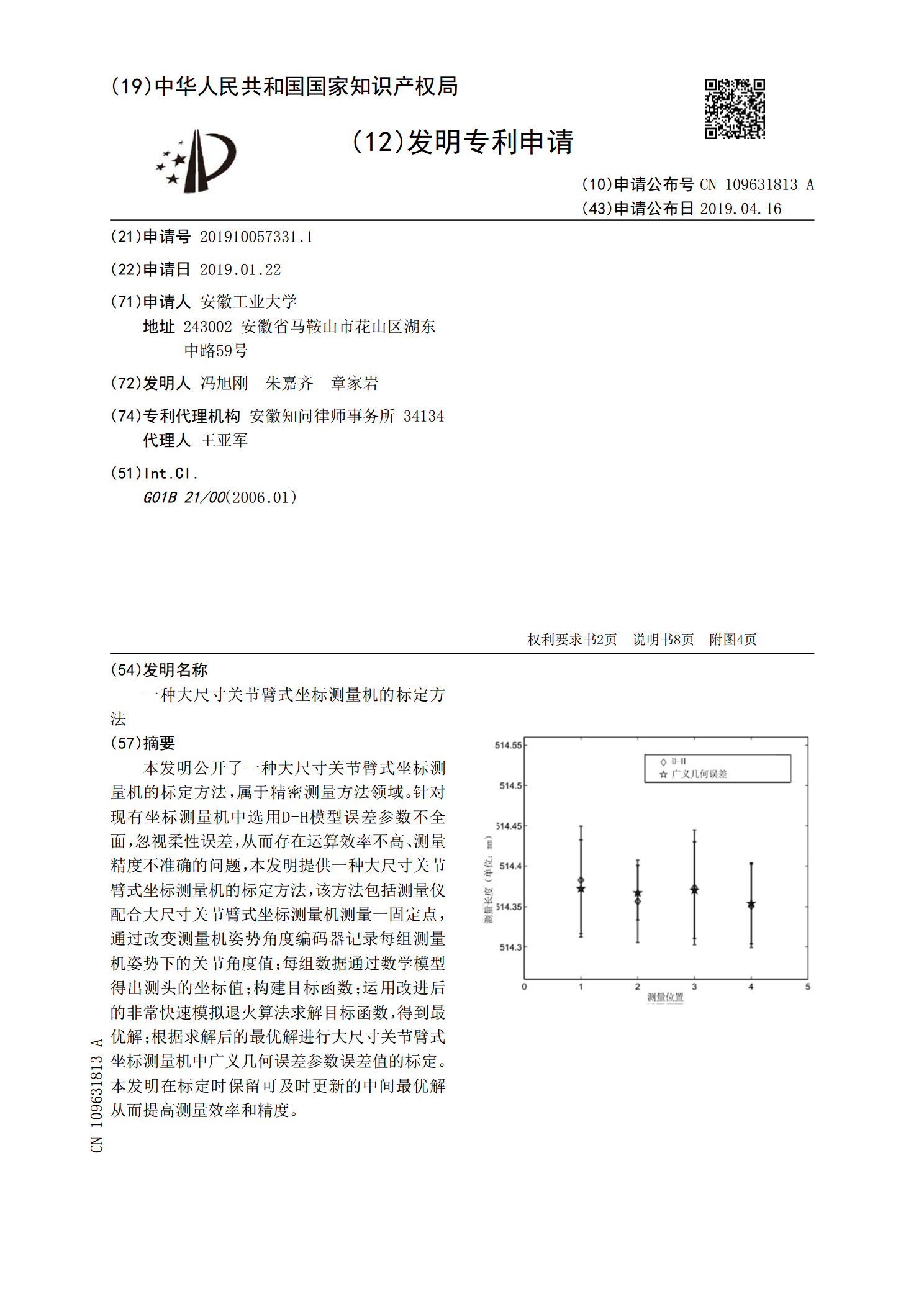
本发明公开了一种大尺寸关节臂式坐标测量机的标定方法,属于精密测量方法领域。针对现有坐标测量机中选用D‑H模型误差参数不全面,忽视柔性误差,从而存在运算效率不高、测量精度不准确的问题,本发明提供一种大尺寸关节臂式坐标测量机的标定方法,该方法包括测量仪配合大尺寸关节臂式坐标测量机测量一固定点,通过改变测量机姿势角度编码器记录每组测量机姿势下的关节角度值;每组数据通过数学模型得出测头的坐标值;构建目标函数;运用改进后的非常快速模拟退火算法求解目标函数,得到最优解;根据求解后的最优解进行大尺寸关节臂式坐标测量机中

柔性关节式坐标测量机结构参数标定的采样策略研究.docx
柔性关节式坐标测量机结构参数标定的采样策略研究柔性关节式坐标测量机结构参数标定的采样策略研究摘要:柔性关节式坐标测量机是一种用于测量大型物体的工业机器人。为了保证测量精度,需要对其结构参数进行准确标定。本文通过研究柔性关节式坐标测量机的运动学模型,提出了一种采样策略,可以有效地标定其结构参数。通过对该策略进行仿真和实验验证,结果表明该策略能够准确地标定柔性关节式坐标测量机的结构参数。关键词:柔性关节式坐标测量机,结构参数标定,采样策略,运动学模型1.引言柔性关节式坐标测量机是一种具有较高自由度的工业机器人

自驱动关节臂坐标测量机关节模块研究.docx
自驱动关节臂坐标测量机关节模块研究自驱动关节臂坐标测量机关节模块研究摘要:自驱动关节臂坐标测量机是一种用于测量目标物体三维位置的装置。本文研究了自驱动关节臂坐标测量机的关节模块,包括结构设计、运动控制和测量方法等方面。结果表明,设计的关节模块可以实现精确的位置控制和测量,具有广泛的应用前景。关键词:自驱动;关节模块;位置控制;测量方法1.引言随着科技的发展,自驱动关节臂坐标测量机在工业、医疗等领域的应用越来越广泛。其通过控制关节模块的运动,实现对目标物体在空间中位置的测量。关节模块作为自驱动关节臂坐标测量