
电惯量模拟通风盘式制动器试验台及电惯量模拟控制方法.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电惯量模拟通风盘式制动器试验台及电惯量模拟控制方法.pdf
本发明属于机电一体化系统,涉及机械回转惯性系统的电气传动模拟和模拟复合制动状态下除受试制动器外的其它制动系统的制动力矩、同步测量组合制动力矩和机械摩擦制动力矩,特别是电惯量模拟通风盘式制动器试验台及电惯量模拟控制方法。通过同步采集飞轮转速、电动机输出扭矩、受试制动器组合制动力矩,按数学模型计算出电机应补偿的总能量,同时算出电机已补偿的总能量并得出二者之差,据此计算出电动机的扭矩输出值并给定,使得试验台在逼近理想飞轮且没有系统固有阻力的状态下运行。它具备能量补偿误差的自动补偿功能,从而将总误差控制在很小的范
通风盘式制动器电惯量模拟试验台及其电惯量模拟控制方法.pdf
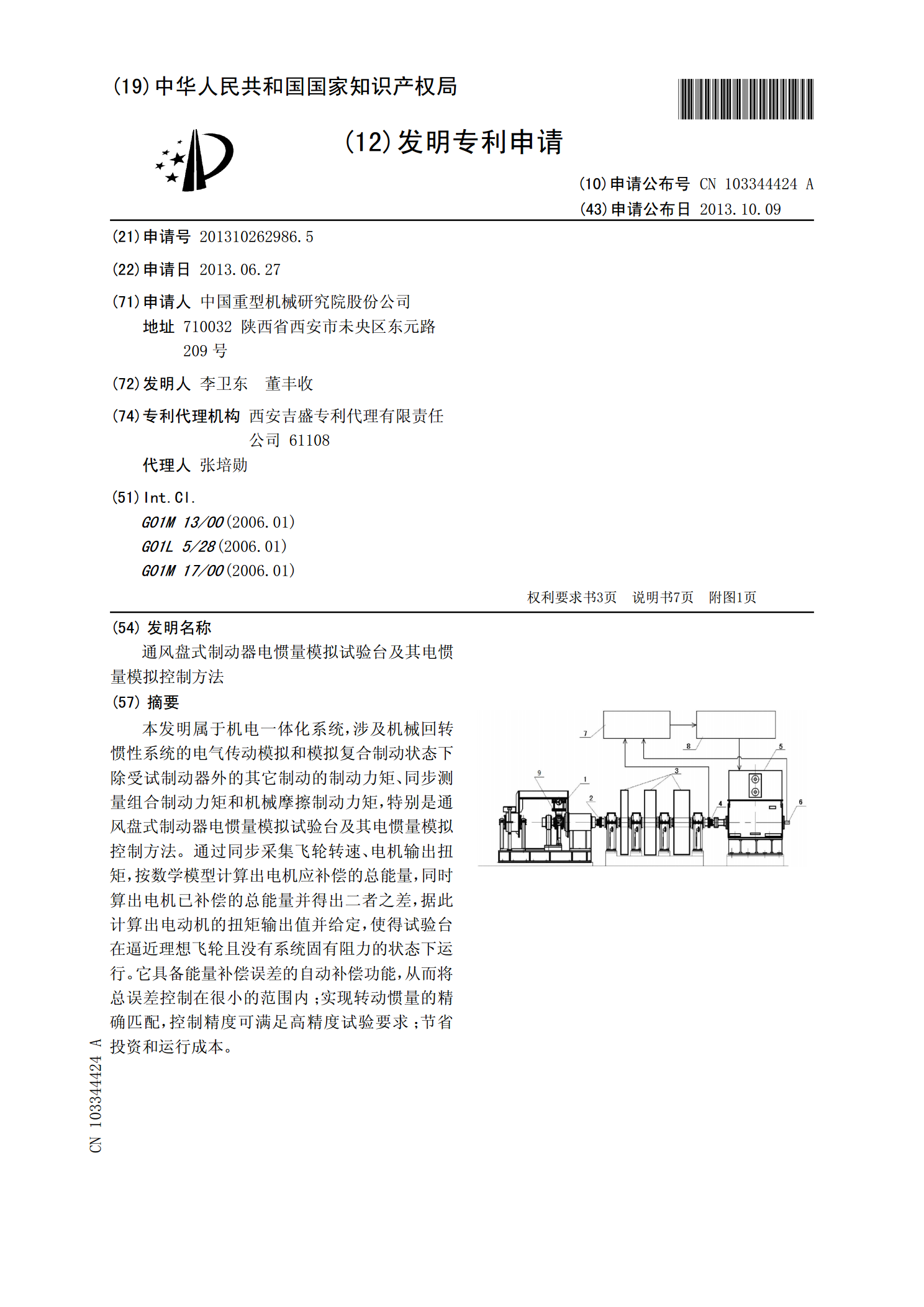
本发明属于机电一体化系统,涉及机械回转惯性系统的电气传动模拟和模拟复合制动状态下除受试制动器外的其它制动的制动力矩、同步测量组合制动力矩和机械摩擦制动力矩,特别是通风盘式制动器电惯量模拟试验台及其电惯量模拟控制方法。通过同步采集飞轮转速、电机输出扭矩,按数学模型计算出电机应补偿的总能量,同时算出电机已补偿的总能量并得出二者之差,据此计算出电动机的扭矩输出值并给定,使得试验台在逼近理想飞轮且没有系统固有阻力的状态下运行。它具备能量补偿误差的自动补偿功能,从而将总误差控制在很小的范围内;实现转动惯量的精确匹配

通风盘式制动器试验台及其电惯量模拟控制方法.pdf
本发明属于机电一体化系统,涉及机械回转惯性系统的电气传动模拟和模拟复合制动状态下除受试制动器外的其它制动的制动力矩、同步测量组合制动力矩和机械摩擦制动力矩,特别是通风盘式制动器试验台及其电惯量模拟控制方法。通过同步采集飞轮转速、电机输出扭矩,按数学模型计算出电机的扭矩输出值,使得试验台在逼近理想飞轮且没有系统固有阻力的状态下运行。实现转动惯量的精确匹配,控制精度可满足高精度试验要求;节省投资和运行成本。

电惯量模拟制动器试验台及电惯量模拟控制方法.pdf
本发明属于机电一体化系统,涉及机械回转惯性系统的电气传动模拟和模拟复合制动状态下除受试制动器外的其它制动系统的制动力矩,特别是具有电惯量模拟制动器试验台及电惯量模拟控制方法。通过同步采集转速、受试制动器制动力矩,按数学模型计算出电机在此时的计算转速并据此给定,使得试验台在逼近理想飞轮且没有试验台系统固有阻力的状态下运行。实现转动惯量的精确匹配,控制精度可满足高精度试验要求。

一种制动器电惯量模拟试验台及其电惯量模拟控制方法.pdf
本发明属于机电一体化系统,涉及机械回转惯性系统的电气传动模拟和模拟复合制动状态下除受试制动器外的其它制动系统的制动力矩,特别是一种制动器电惯量模拟试验台及其电惯量模拟控制方法。通过同步采集飞轮转速、受试制动器制动力矩,按数学模型计算出电机在此时的计算角速度并据此给定,使得试验台在逼近理想飞轮且没有试验台系统固有阻力的状态下运行。实现转动惯量的精确匹配,控制精度可满足高精度试验要求。