
定位离心泵PIV叶轮旋转中心方法和装置.pdf

一只****ua


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位离心泵PIV叶轮旋转中心方法和装置.pdf
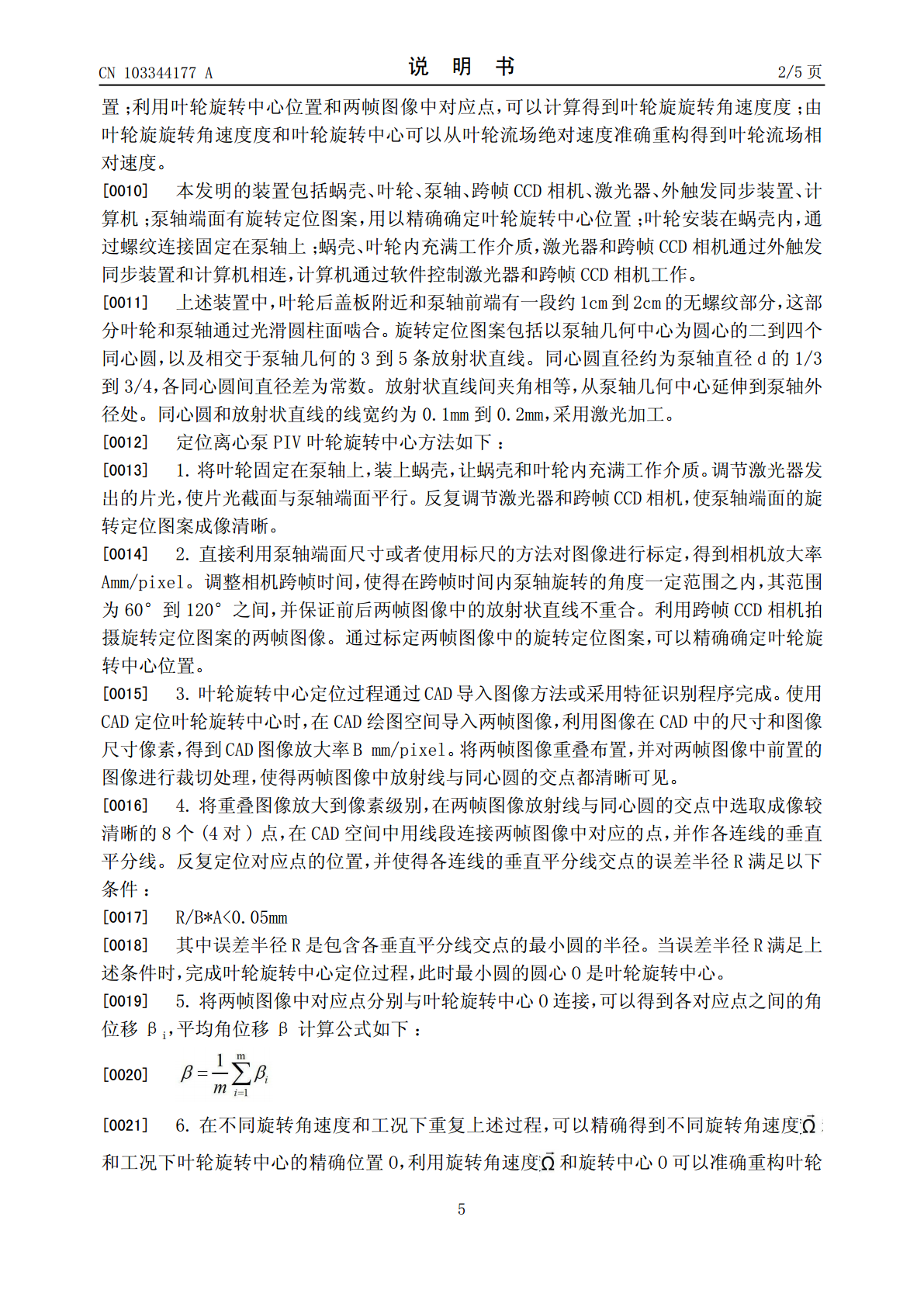
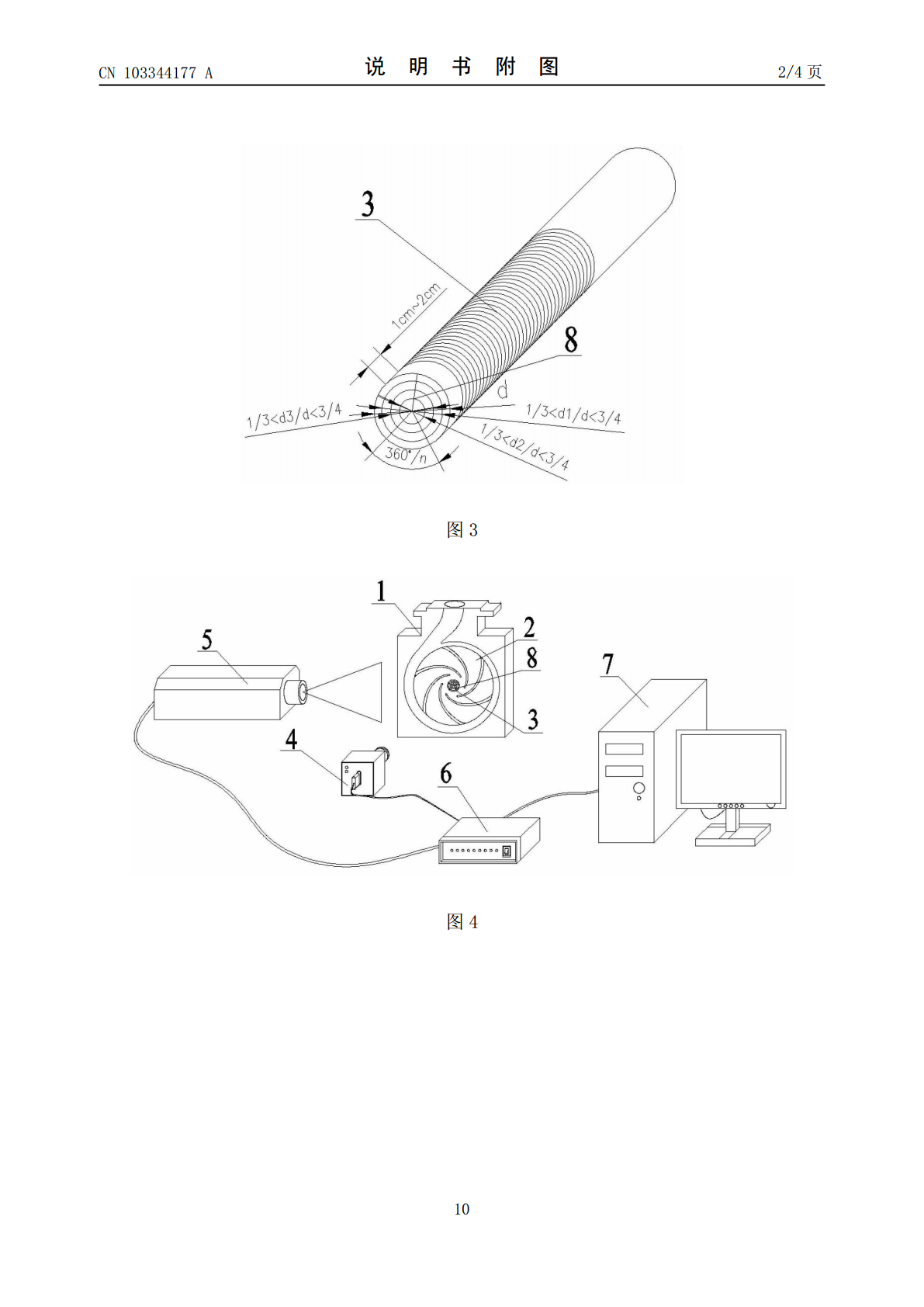
本发明公开一种用于离心泵PIV叶轮旋转中心定位的方法和装置。主要用于离心泵PIV内流测试中叶轮或叶轮旋转中心的精确定位,涉及流体实验领域。本发明的装置包括蜗壳、叶轮、泵轴、跨帧CCD相机、激光器、外触发同步装置、计算机。泵轴端面有旋转定位图案。本发明用对跨帧CCD相机拍摄的旋转定位图案进行处理,可以精确确定叶轮旋转中心的位置;通过跨帧时间设置,可以实现对不同旋转角速度下叶轮旋转中心的定位;利用叶轮旋转中心的精确位置,还可以精确得到叶轮的旋转角速度,实现对PIV测试中叶轮内相对速度的精确重构。

立式离心泵叶轮定位装置.pdf
一种立式离心泵叶轮定位装置,涉及离心泵叶轮定位装置,泵轴上设有叶轮,叶轮一侧的泵轴上设有环槽,环槽内设有卡环,卡环另一侧设有轴套,轴套上设有螺钉,螺钉将轴套与叶轮紧固并卡在卡环上,由于叶轮一侧的泵轴上设有环槽,环槽内设有卡环,卡环另一侧设有轴套,轴套上设有螺钉,螺钉将轴套与叶轮紧固并卡在卡环上,各种部件加工精度要求低,加工容易,制造成本低,叶轮不易脱落,不影响正常使用,适用于立式离心泵叶轮定位。

髋臼旋转中心的定位装置及其定位方法.pdf
一种髋臼旋转中心的定位装置及其定位方法,涉及一种定位装置,尤其是一种快速定位髋臼旋转中心的定位装置及其定位方法。本发明的髋臼旋转中心的定位装置及其定位方法,其特征在于该定位装置包括手柄和支腿,支腿为三个,手柄底端设置有万向节,支腿通过万向节与手柄连接,支腿绕万向节转动,支腿为伸缩式结构。本发明的髋臼旋转中心的定位装置及其定位方法,设计科学,结构简单,使用方便,先利用计算机计算出发育正常一侧的髋臼中心,再通过刻度尺调整髋臼旋转中心定位装置三条支腿的长度,将三条支腿分别放置在三个标志点上,就能准确的定位髋臼旋

一种离心泵叶轮复合式旋转抛光装置.pdf
一种离心泵叶轮复合式旋转抛光装置,底座上安装底部驱动装置,底部驱动装置的输出轴与传动轴连接,筒体位于工作台上,筒体内安装叶轮,传动轴穿过工作台并伸入筒体内,传动轴的上端与叶轮连接,叶轮的上部敞口与稳流器的下部出口连通;叶轮位于筒体内腔的下侧,筒体内腔的上侧设置储水槽,储水槽的一圈开有进水孔,储水槽的下方出水口与孔板连接,孔板与稳流器的上部入口相接,筒体的上端开有注水孔,筒体的下端开有出水孔,筒体的上端与顶部驱动装置的输出轴联动,工作台上安装框架,框架上安装顶部驱动装置。本发明提供一种结构简化、体积较小、抛
一种用于离心泵PIV误差测量及标定的装置和方法.pdf
本发明公开了一种用于离心泵PIV误差测量及标定的装置和方法,用于离心泵PIV内流实验误差测量及标定,涉及流体实验领域。本发明的装置由蜗壳、标定盘、叶轮、泵轴、联轴器、电机、转速传感器、转速显示与同步器、减震底座、激光器、跨帧CCD相机、外触发同步装置和计算机组成。先卸下蜗壳和叶轮,调整标定盘至测量截面位置,并旋紧两端螺母将其固定在泵轴上,在空气中测量PIV系统的误差;然后装上蜗壳,待蜗壳内充满工作介质后,测量实验模型的误差;最后卸下标定盘,将叶轮固定在泵轴上,用PIV系统测量流场,利用测得的两种误差完成标