
机载雷达空时三维非自适应预滤波方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机载雷达空时三维非自适应预滤波方法.docx
机载雷达空时三维非自适应预滤波方法机载雷达是一种在飞机等航空器上搭载的雷达设备,用于探测周围环境中的目标。由于飞行过程中,雷达设备会受到飞机振动、干扰等因素的影响,因此需要对雷达信号进行预处理,以提高目标探测的准确性和稳定性。本文将重点讨论机载雷达空时三维非自适应预滤波方法,该方法可以有效地抑制噪声并提升雷达探测性能。首先,我们先了解一下机载雷达的工作原理。机载雷达通过发送脉冲信号,并接收目标的回波信号来实现目标探测。回波信号包含了目标的位置、速度和形状等信息,但同时也会受到噪声的影响。因此,在对回波信号

机载雷达空时自适应检测方法研究进展.docx
机载雷达空时自适应检测方法研究进展标题:机载雷达空时自适应检测方法研究进展摘要:机载雷达是一种重要的遥感技术,广泛应用于航空领域中。为了提高机载雷达的检测性能,研究人员一直致力于开发新的空时自适应检测方法。该论文综述了机载雷达空时自适应检测方法的研究进展,包括正交波束形成、空时自适应滤波和小尺度空时自适应处理等方面。通过比较这些方法的优缺点,可以为机载雷达系统的设计和性能优化提供参考。1.引言机载雷达是一种通过发送和接收雷达波束来探测目标的遥感技术。然而,由于大气传播、地物杂波和噪声等因素的影响,机载雷达
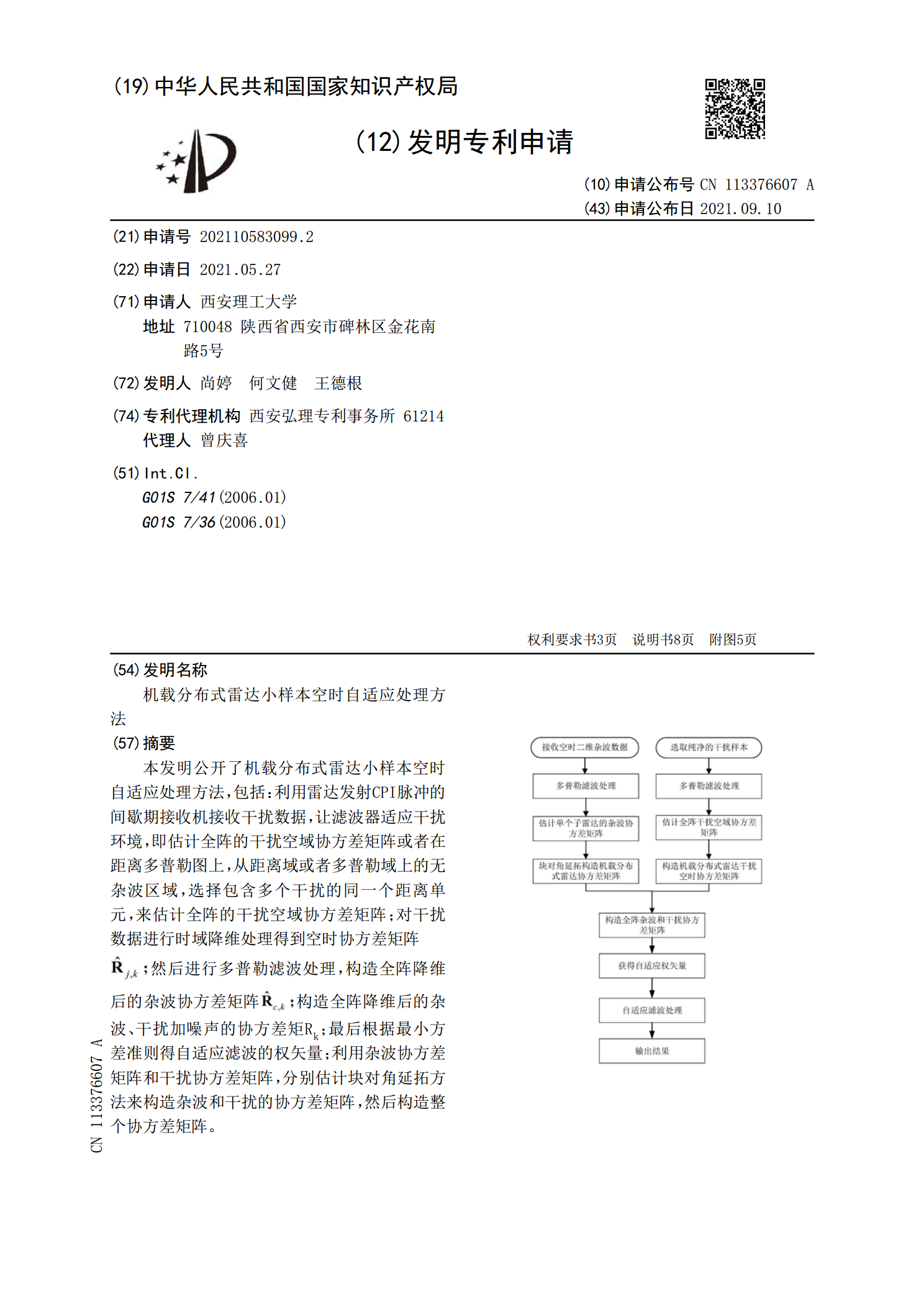
机载分布式雷达小样本空时自适应处理方法.pdf
本发明公开了机载分布式雷达小样本空时自适应处理方法,包括:利用雷达发射CPI脉冲的间歇期接收机接收干扰数据,让滤波器适应干扰环境,即估计全阵的干扰空域协方差矩阵或者在距离多普勒图上,从距离域或者多普勒域上的无杂波区域,选择包含多个干扰的同一个距离单元,来估计全阵的干扰空域协方差矩阵;对干扰数据进行时域降维处理得到空时协方差矩阵

机载MIMO雷达两级降维空时自适应处理方法.docx
机载MIMO雷达两级降维空时自适应处理方法一、引言随着雷达技术的不断发展,MIMO雷达已经成为一种非常重要的雷达技术。MIMO雷达具有多种优点,比如可以提高雷达的分辨率和对抗干扰的能力。但是,由于多输入多输出系统中有大量的雷达回波数据,处理这些数据是非常复杂的。因此,如何有效地处理MIMO雷达数据,是MIMO雷达技术研究中的一个重要问题。降维是一种有效的处理大量数据的方法。在MIMO雷达系统中,数据降维也是一种有效的处理方法。本文提出了一种基于两级降维空时自适应处理方法。该方法可以有效地降低数据处理的复杂
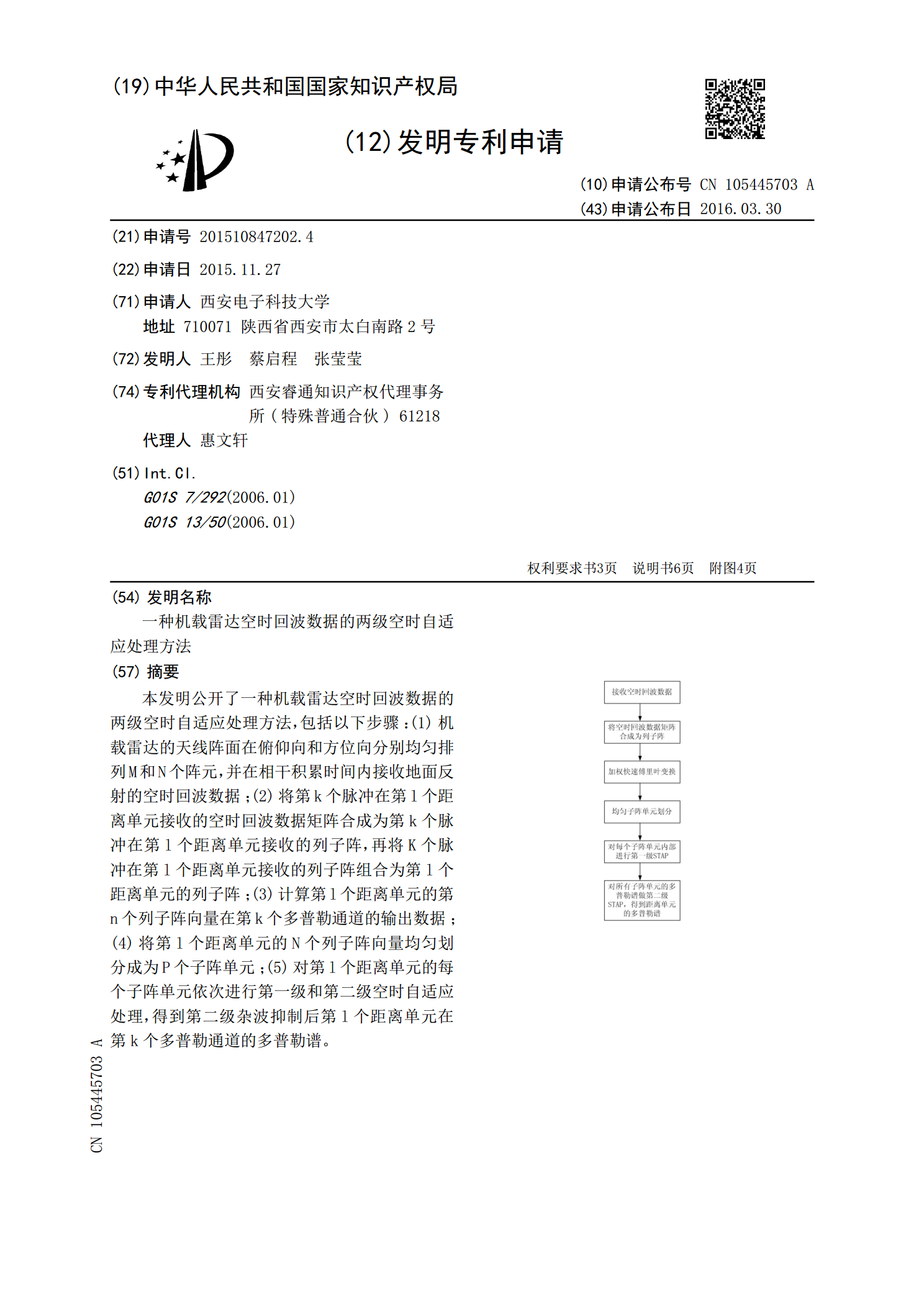
一种机载雷达空时回波数据的两级空时自适应处理方法.pdf
本发明公开了一种机载雷达空时回波数据的两级空时自适应处理方法,包括以下步骤:(1)机载雷达的天线阵面在俯仰向和方位向分别均匀排列M和N个阵元,并在相干积累时间内接收地面反射的空时回波数据;(2)将第k个脉冲在第l个距离单元接收的空时回波数据矩阵合成为第k个脉冲在第l个距离单元接收的列子阵,再将K个脉冲在第l个距离单元接收的列子阵组合为第l个距离单元的列子阵;(3)计算第l个距离单元的第n个列子阵向量在第k个多普勒通道的输出数据;(4)将第l个距离单元的N个列子阵向量均匀划分成为P个子阵单元;(5)对第l个