
基于ProE和ADAMS的欠驱动苹果采摘机械手运动学仿真分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ProE和ADAMS的欠驱动苹果采摘机械手运动学仿真分析.docx
基于ProE和ADAMS的欠驱动苹果采摘机械手运动学仿真分析随着现代农业的发展和智能化程度的提高,机械采摘越来越受到农民和农业企业的青睐。机械采摘可以极大地提高采摘效率和采摘质量,降低采摘成本。苹果作为我国最重要的果品之一,机械采摘也在不断发展中。本文主要基于ProE和ADAMS两个软件,对一种欠驱动苹果采摘机械手的运动学仿真分析进行研究,旨在探究机械手运动过程中的关键因素和优化方案。一、欠驱动苹果采摘机械手的结构及运行原理欠驱动苹果采摘机械手是一种基于可重构机器人理论和技术开发的新型机械手,在机械结构、

基于ProE和ADAMS的林木干果采摘臂的运动仿真分析.docx
基于ProE和ADAMS的林木干果采摘臂的运动仿真分析摘要:本研究以林木干果采摘为背景,基于ProE和ADAMS两个软件平台,进行了林木干果采摘臂的运动与力学仿真分析。通过建立采摘臂的三维模型及运动转换关系,利用ADAMS对采摘臂的运动轨迹与实时动力学参数进行了仿真模拟,并对仿真结果进行分析。本研究为林木干果采摘机械的设计与仿真提供了理论基础和技术支持。关键词:林木干果采摘,ProE,ADAMS,仿真分析,运动转换引言:林木干果采摘在农业生产中起着重要的作用,对提高农作物产量和品质有着不可替代的作用。由于

基于ADAMS和ProE的目标物体抓取机械手的运动学仿真.docx
基于ADAMS和ProE的目标物体抓取机械手的运动学仿真一、引言机器人技术在近年来得到了快速的发展,成为了未来生产和应用领域的关键技术。在机器人应用领域中,物体抓取机械手被广泛应用于自动化生产和物流领域。目标物体抓取机械手的运动学仿真是设计和优化机械手的重要工具,本文以基于ADAMS和ProE的目标物体抓取机械手的运动学仿真为研究对象,探讨其仿真原理和应用价值。二、目标物体抓取机械手的构成目标物体抓取机械手一般由机械臂和夹爪组成。其中机械臂是机械手臂的主干部位,负责移动和转动机械手臂;夹爪则是机械手抓取和

基于ProE和ADAMS的装夹机械手运动仿真.docx
基于ProE和ADAMS的装夹机械手运动仿真摘要本文介绍了一种基于ProE和ADAMS的装夹机械手运动仿真方法。首先,通过ProE建立机械手三维模型,然后将其导入ADAMS进行运动仿真。仿真结果表明,该方法在实现机械手运动仿真方面具有较高的准确性和可靠性。此外,本文还分析了机械手在运动过程中的动力学特性,为机械手的设计和优化提供了一定的参考。关键词:ProE;ADAMS;机械手;运动仿真;动力学特性引言机械手作为一种现代工业自动化设备,广泛应用于生产和制造行业中。机械手具有灵活性高、精度高、效率高等优点。
一种欠驱动苹果采摘末端机械手.pdf
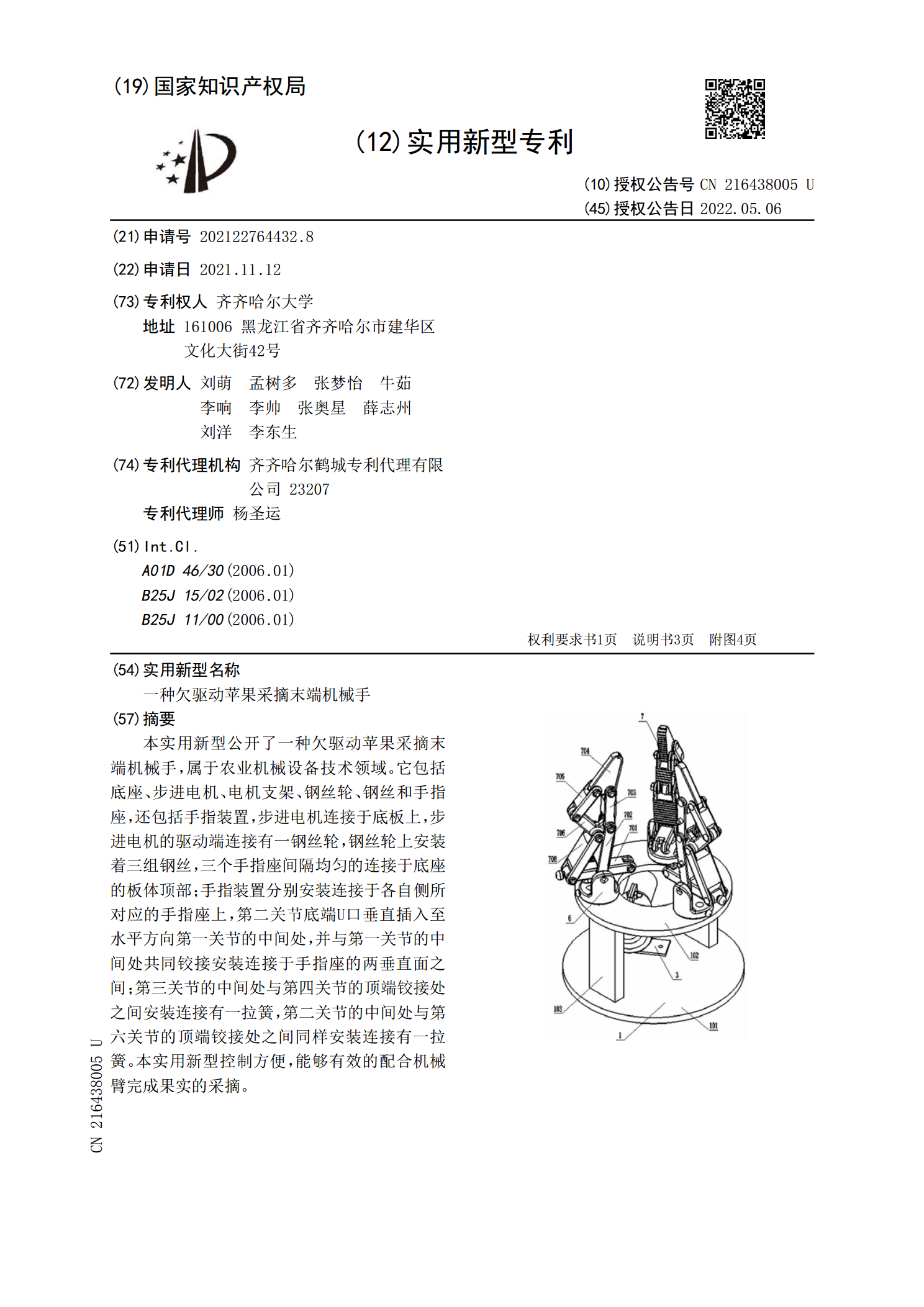
本实用新型公开了一种欠驱动苹果采摘末端机械手,属于农业机械设备技术领域。它包括底座、步进电机、电机支架、钢丝轮、钢丝和手指座,还包括手指装置,步进电机连接于底板上,步进电机的驱动端连接有一钢丝轮,钢丝轮上安装着三组钢丝,三个手指座间隔均匀的连接于底座的板体顶部;手指装置分别安装连接于各自侧所对应的手指座上,第二关节底端U口垂直插入至水平方向第一关节的中间处,并与第一关节的中间处共同铰接安装连接于手指座的两垂直面之间;第三关节的中间处与第四关节的顶端铰接处之间安装连接有一拉簧,第二关节的中间处与第六关节的顶