
基于GPU的结构光中心快速提取方法及实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于GPU的结构光中心快速提取方法及实现.docx
基于GPU的结构光中心快速提取方法及实现论文标题:基于GPU的结构光中心快速提取方法及实现摘要:随着三维成像技术的不断发展,结构光成像作为一种非接触式的三维表面重建方法,受到了广泛关注。然而,由于结构光图像中存在着大量的噪声和干扰信息,结构光中心提取一直是一个重要且困难的问题。本文提出了一种基于图形处理器(GPU)的结构光中心快速提取方法,并通过实验证明该方法的效果显著。1.引言结构光成像技术是一种通过激光器发射结构化光并捕获光线反射或散射后形成的图像来重建三维表面形状的方法。与其他三维成像技术相比,结构

基于GPU的结构光三维测量快速计算方法.docx
基于GPU的结构光三维测量快速计算方法基于GPU的结构光三维测量快速计算方法摘要:随着三维测量技术在工业、医疗、航空等领域的广泛应用,对快速、高效的三维测量方法的需求日益增加。结构光三维测量技术以其非接触、高精度的优点成为研究热点之一。然而,传统的结构光三维测量方法在计算速度上存在一定瓶颈。为了解决这一问题,本文提出了一种基于GPU的结构光三维测量快速计算方法。通过GPU的并行计算能力,加速了三维重构算法和相位解包算法的计算过程。实验结果表明,该方法在保证测量精度的同时,大幅提高了计算速度。关键词:结构光
一种基于GPU实现的快速音频检索方法.pdf
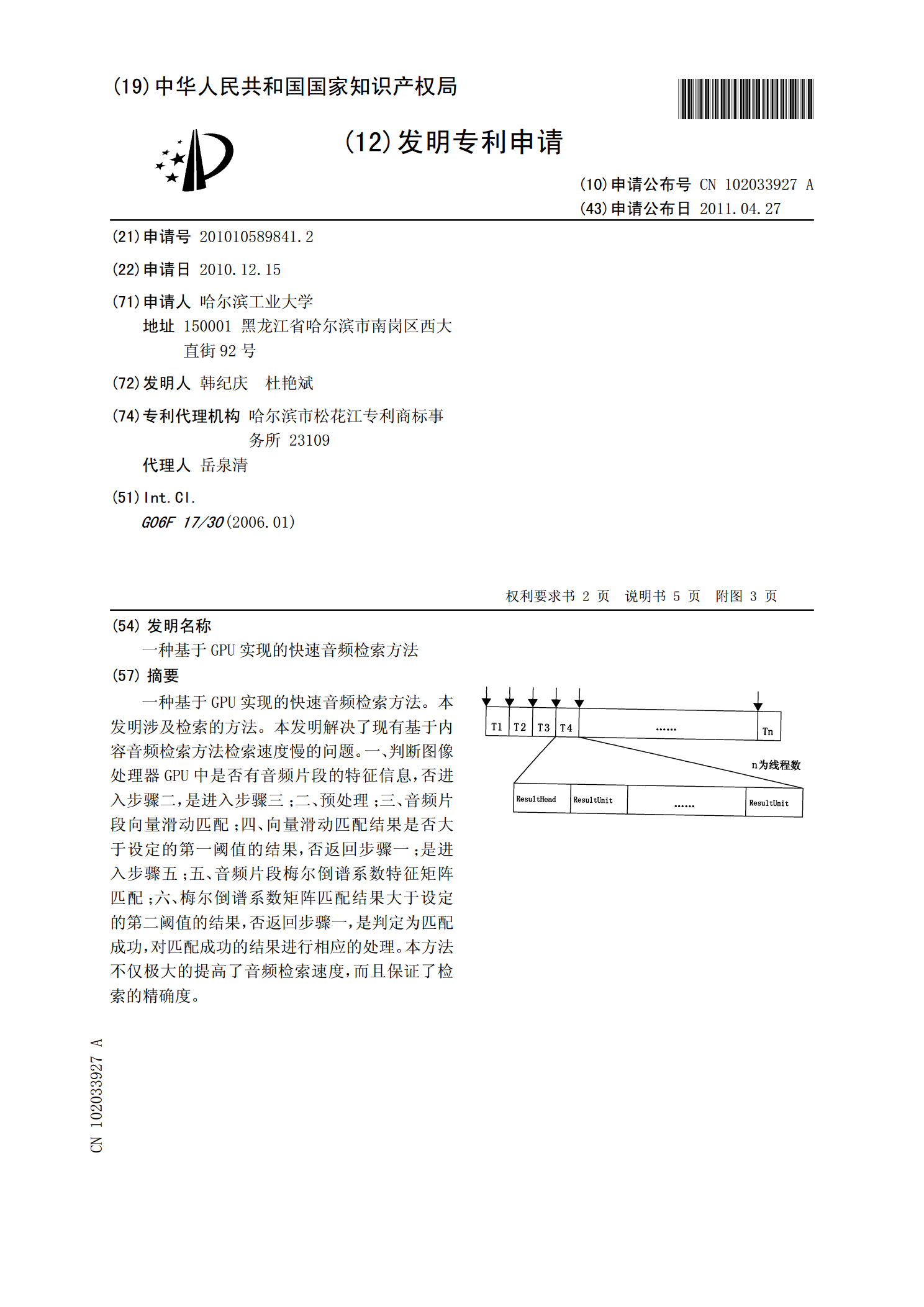
一种基于GPU实现的快速音频检索方法。本发明涉及检索的方法。本发明解决了现有基于内容音频检索方法检索速度慢的问题。一、判断图像处理器GPU中是否有音频片段的特征信息,否进入步骤二,是进入步骤三;二、预处理;三、音频片段向量滑动匹配;四、向量滑动匹配结果是否大于设定的第一阈值的结果,否返回步骤一;是进入步骤五;五、音频片段梅尔倒谱系数特征矩阵匹配;六、梅尔倒谱系数矩阵匹配结果大于设定的第二阈值的结果,否返回步骤一,是判定为匹配成功,对匹配成功的结果进行相应的处理。本方法不仅极大的提高了音频检索速度,而且保证

线结构光条纹中心提取方法.docx
线结构光条纹中心提取方法标题:线结构光条纹中心提取方法摘要:线结构光条纹中心提取是光学测量中的一项重要任务。条纹中心提取对于实现高精度测量和三维重构具有重要意义。本文综述了线结构光条纹中心提取方法的研究进展,并分析了各方法的优点和局限性。在此基础上,提出了一种基于图像处理和机器学习的方法,可以提高线结构光条纹中心提取的精度和鲁棒性。关键词:线结构光条纹,中心提取,图像处理,机器学习引言:线结构光条纹中心提取是光学测量中一个重要的环节,可以通过测量物体表面的形变来实现三维重构。线结构光条纹基于光的互补,结合

基于Hessian矩阵的线结构光中心线提取方法研究.docx
基于Hessian矩阵的线结构光中心线提取方法研究摘要本文以基于Hessian矩阵的线结构光中心线提取方法为研究对象,探究了其实现原理和优势。首先介绍了基于光条纹的线结构光原理,然后详细阐述了矩阵和多元函数的概念、性质和应用,特别是Hessian矩阵。随后,提出并详细阐述了一种基于Hessian矩阵的线结构光中心线提取方法,并对其性能进行了测试和分析。结果表明,该方法具有较高的精度和鲁棒性,可用于多种线结构光的应用场景中。关键词:Hessian矩阵,线结构光,中心线提取AbstractThispapere