
图结构与Dijkstra算法在无人机航迹规划中的应用.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

图结构与Dijkstra算法在无人机航迹规划中的应用.docx
图结构与Dijkstra算法在无人机航迹规划中的应用无人机作为一种新型交通工具,已经开始在不同领域中得到广泛应用。其中之一就是在航空监测和监视任务中的应用。在这些任务中,无人机需要执行一系列指定的航迹来实现目标,如搜索行动和图像监视。针对这些任务,使用图结构和Dijkstra算法能够帮助无人机完成航迹规划,实现高效的任务执行。图结构是由节点和边组成的数据结构,常用于描述对象之间的关系。在无人机航迹规划中,图结构可以用来表示无人机需要经过的路径和路径之间的关系。在这里,节点可以表示无人机要经过的航点,边可以
基于改进的Dijkstra算法的飞行器航迹快速规划方法.pdf
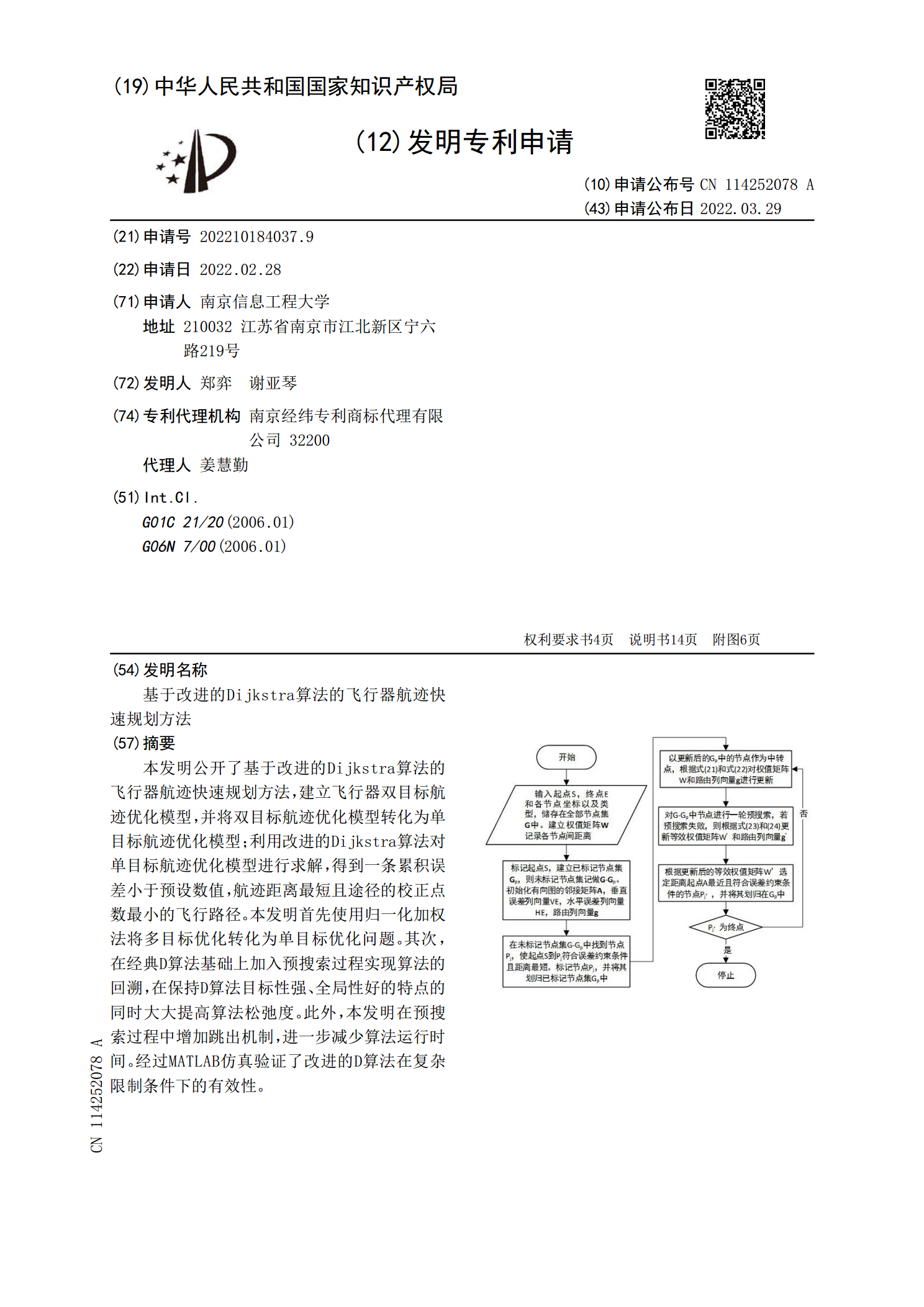
本发明公开了基于改进的Dijkstra算法的飞行器航迹快速规划方法,建立飞行器双目标航迹优化模型,并将双目标航迹优化模型转化为单目标航迹优化模型;利用改进的Dijkstra算法对单目标航迹优化模型进行求解,得到一条累积误差小于预设数值,航迹距离最短且途径的校正点数最小的飞行路径。本发明首先使用归一化加权法将多目标优化转化为单目标优化问题。其次,在经典D算法基础上加入预搜索过程实现算法的回溯,在保持D算法目标性强、全局性好的特点的同时大大提高算法松弛度。此外,本发明在预搜索过程中增加跳出机制,进一步减少算法

基于乌贼算法的无人机航迹规划.docx
基于乌贼算法的无人机航迹规划基于乌贼算法的无人机航迹规划摘要:随着无人机技术的迅速发展,无人机航迹规划成为无人系统研究中的重要问题。本论文基于乌贼算法,探讨了无人机航迹规划的相关问题,并通过仿真实验验证了乌贼算法在无人机航迹规划中的有效性。引言:无人机航迹规划是指确定无人机的飞行路径,使其在特定任务环境下能够达到预定的目标点或区域。无人机航迹规划是无人系统研究中重要的问题之一,对于提高无人机的飞行效率、保证任务的完成和提高系统的鲁棒性具有重要意义。无人机航迹规划存在的挑战包括路径规划、动态避障和路径跟踪等

基于ADS-B的航迹规划算法在无人机飞行管理中的应用.docx
基于ADS-B的航迹规划算法在无人机飞行管理中的应用随着无人机的飞行管理日益重要,如何确保其安全、有效地执行任务已经成为行业和研究重点。基于ADS-B的航迹规划算法在无人机飞行管理中具有重要的应用前景。本文将探讨该算法的相关概念、工作原理、应用场景和未来展望。一、ADS-B技术和概念ADS-B(自动相关监视广播)是一种航空电子技术,将飞机的位置、速度和其他信息广播到空中和地面的接收器。ADS-B是一种被动式监视系统,要求被监视目标装有符合标准的ADS-B设备,接收器可以在没有其他雷达和传感器的情况下确定目

基于智能算法的无人机航迹规划.docx
基于智能算法的无人机航迹规划随着无人机技术的不断发展,无人机在各个领域中得到越来越广泛的应用,其中最为重要的应用是无人机作为一种无人化的空中交通工具。无人机的飞行路径规划是无人机运行中非常关键的一部分,合理的规划是保证无人机飞行安全的核心措施。随着深度学习和智能算法的不断发展,无人机航迹规划也正在发生着根本性的变化。现代的无人机航迹规划从最初的手工规划逐渐演变为基于智能算法的自动化航迹规划。这种智能化的技术改变了传统规划方式的不足,可以提高无人机飞行的效率和安全。本文将重点介绍用智能算法进行无人机航迹规划