
区间平滑在船用INSGPS姿态组合导航系统事后评估中的应用.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

区间平滑在船用INSGPS姿态组合导航系统事后评估中的应用.docx
区间平滑在船用INSGPS姿态组合导航系统事后评估中的应用导航系统在现代的航海和船舶应用中扮演了至关重要的角色,为船舶的航行和操作提供了准确的位置和方向信息。其中一个核心的技术是姿态组合导航系统(INS),其通过将多种传感器(如加速度计、陀螺仪、罗盘、GPS等)数据融合起来以提供更加准确的船舶姿态估计。然而,姿态组合导航系统并不总是完美可靠的,可能由于多种因素,如传感器的不稳定性、姿态推算算法的误差以及环境条件的影响等,导致导航系统估计的姿态存在一定的偏差。因此,在实际运用中,需要对导航系统进行事后评估,

模糊自适应Kalman滤波在INSGPS组合导航系统中的应用.docx
模糊自适应Kalman滤波在INSGPS组合导航系统中的应用随着空间技术和导航技术的快速发展,组合导航系统已经成为了卫星导航领域的重要研究方向之一。INSGPS组合导航系统是将惯性导航系统(INS)和全球定位系统(GPS)结合起来,实现高精度的导航定位。但是,由于INS的误差会随时间累计,因此需要采用滤波算法对INS输出进行修正,以获得更精确的导航定位结果。Kalman滤波是一种线性系统状态估计算法,它通过组合测量数据和系统模型来估计系统的状态,并用估计值更新系统状态。但是,Kalman滤波需要准确的先验

INSGPS组合导航系统仿真剖析.ppt
INS/GPS组合导航系统仿真分析INS/GPS组合导航系统程序流程度初值的选取组合导航系统误差方程平台误差角方程平台误差角方程速度误差方程及位置误差方程组合导航系统的状态方程组合导航系统的状态方程组合导航系统的状态方程组合导航系统的状态方程系统量测方程INS的的速度量测信息,可表示为地理系下的真值与相应的速度误差之和:GPS的速度量测信息,同样可表示为地理系下的真值与相应的测速误差之差:不考虑天向速度,速度量测矢量为:式中:终钦欧冬予是由梁吐席辞缆稳潦尺肆缄茨忻轻乖颁镑轰卵睫迸显兜檄绣倍INSGPS组合

一种新的粒子滤波算法在INSGPS组合导航系统中的应用.docx
一种新的粒子滤波算法在INSGPS组合导航系统中的应用摘要本文旨在研究一种新的粒子滤波算法在INSGPS组合导航系统中的应用。首先介绍INSGPS组合导航系统的基本原理和组成部件,然后分析传统粒子滤波算法的不足之处,进而引入一种新的混合粒子滤波算法,并详细介绍其应用于INSGPS组合导航系统的过程。最后,通过仿真实验验证新算法的性能。关键词:INSGPS;粒子滤波;混合粒子滤波;组合导航AbstractThispaperaimstostudytheapplicationofanewparticlefilt
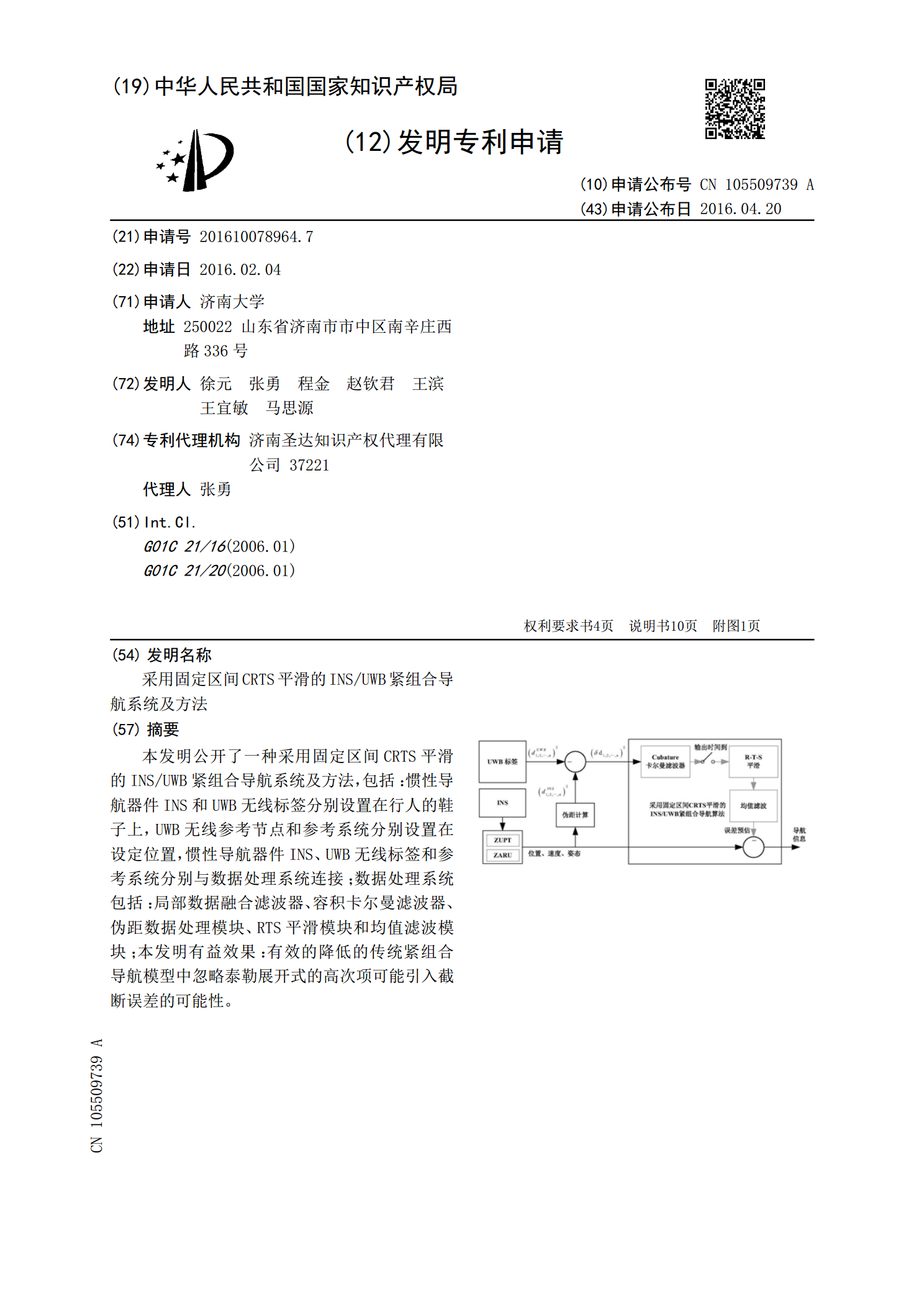
采用固定区间CRTS平滑的INS/UWB紧组合导航系统及方法.pdf
本发明公开了一种采用固定区间CRTS平滑的INS/UWB紧组合导航系统及方法,包括:惯性导航器件INS和UWB无线标签分别设置在行人的鞋子上,UWB无线参考节点和参考系统分别设置在设定位置,惯性导航器件INS、UWB无线标签和参考系统分别与数据处理系统连接;数据处理系统包括:局部数据融合滤波器、容积卡尔曼滤波器、伪距数据处理模块、RTS平滑模块和均值滤波模块;本发明有益效果:有效的降低的传统紧组合导航模型中忽略泰勒展开式的高次项可能引入截断误差的可能性。