
压电陶瓷驱动微小机器人移动机构性能实验研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

压电陶瓷驱动微小机器人移动机构性能实验研究.docx
压电陶瓷驱动微小机器人移动机构性能实验研究压电陶瓷驱动微小机器人移动机构性能实验研究摘要:微小机器人在医疗、环境监测和工业生产等领域具有广阔的应用前景。为了实现微小机器人的高效移动,压电陶瓷被应用于其驱动系统。本文基于压电陶瓷驱动微小机器人的移动机构进行性能实验研究。实验结果表明,压电陶瓷驱动系统具有较高的驱动效率和快速响应特性,能够实现微小机器人的精确控制和高效移动。1.引言微小机器人是指尺寸在微米至毫米级别、能够执行特定任务的微小机械设备。由于其尺寸小、灵活性高、能耗低等优势,微小机器人在医疗、环境监

压电陶瓷驱动微小型机器人的运动分析与仿真.docx
压电陶瓷驱动微小型机器人的运动分析与仿真压电陶瓷驱动微小型机器人的运动分析与仿真摘要压电陶瓷材料因其具有良好的压电效应和力传感特性,被广泛应用于微小型机器人的驱动系统中。本文通过对压电陶瓷驱动微小型机器人的运动进行分析与仿真,探讨了其驱动原理、运动特性以及优化方法,为微小型机器人的设计与应用提供了参考。1.引言随着科技的不断进步,微小型机器人的研究和应用正日益受到人们的关注。微小型机器人具有体积小、灵活性强、可在狭小空间中操作等优势,被广泛应用于医学、环境监测、制造业等领域。压电陶瓷材料作为一种重要的驱动

压电陶瓷直线驱动器的设计与实验研究.docx
压电陶瓷直线驱动器的设计与实验研究压电陶瓷材料具有优异的电-机-声特性和可靠性,广泛应用于微驱动、精密调节、高精度定位等领域。其中,压电陶瓷直线驱动器具有简单、紧凑、高效、稳定和长寿命等优点,被广泛用于制造业、仪器仪表、光学仪器、医疗设备等领域。本文研究了压电陶瓷直线驱动器的设计和实验,重点讨论了压电陶瓷材料特性和直线驱动器结构设计、测试与分析等方面的问题。一、压电陶瓷材料的特性压电陶瓷材料是指在外加电场或机械应力下,可以发生电-机-声相互转换现象的陶瓷材料。常用的压电陶瓷材料有PZT、PMN、PZN、P

可动态应用的压电陶瓷驱动电路的实验研究.docx
可动态应用的压电陶瓷驱动电路的实验研究压电陶瓷是一种能够将机械能转化为电能、电能转化为机械能的智能材料,在机械振动控制、声音发生与检测、定位控制等领域广泛应用。为了实现其应用,需要设计出可动态应用的压电陶瓷驱动电路。本文将基于实验研究,探讨可动态应用的压电陶瓷驱动电路的设计与实现。一、压电陶瓷基本原理压电陶瓷是一种能够将机械能转化为电能、电能转化为机械能的智能材料,其基本原理是当外加机械应力的变化时,会使得在材料中的电荷分布产生电势差,从而产生电场效应。而当外加电场的变化时,也会使得电势差产生电势差,进而
压电陶瓷驱动器性能测试夹具.pdf
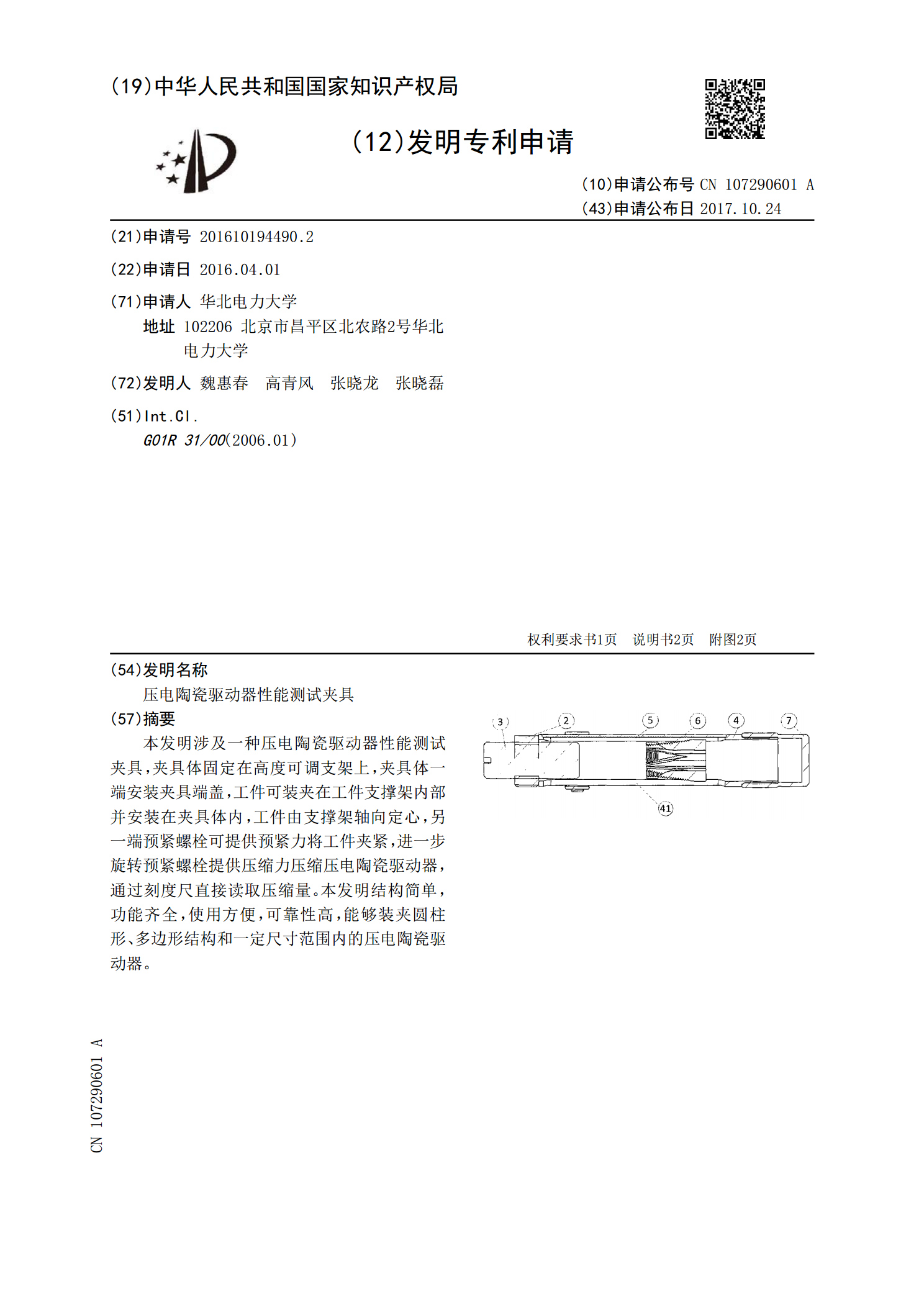
本发明涉及一种压电陶瓷驱动器性能测试夹具,夹具体固定在高度可调支架上,夹具体一端安装夹具端盖,工件可装夹在工件支撑架内部并安装在夹具体内,工件由支撑架轴向定心,另一端预紧螺栓可提供预紧力将工件夹紧,进一步旋转预紧螺栓提供压缩力压缩压电陶瓷驱动器,通过刻度尺直接读取压缩量。本发明结构简单,功能齐全,使用方便,可靠性高,能够装夹圆柱形、多边形结构和一定尺寸范围内的压电陶瓷驱动器。