
纯电动车底盘优化.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

纯电动车底盘优化.docx
纯电动车底盘优化1252204戴增志电动车与传统发动机驱动汽车相比,在整车质量大小、能源提供形式、载荷分布、管线走向等多方面存在较大差异,同时也使电动车各部件的布置具有很大的灵活性。如有一种电动车采用轮毂电机,以驱动电机及车用动力电池组为动力源,取消了传统车辆的发动机动力总成及传动系统,整车质心位置及簧载质量均发生了变化,动力电池组由于体积大、质量重,其布置方式及位置对电动车操纵稳定性影响很大。为了使纯电动车辆底盘结构布置更加合理和紧凑,本文针对电动车的特殊性,从动力学优化分析方面着手,提出纯电动车底盘布
分布式纯电动车的底盘系统.pdf
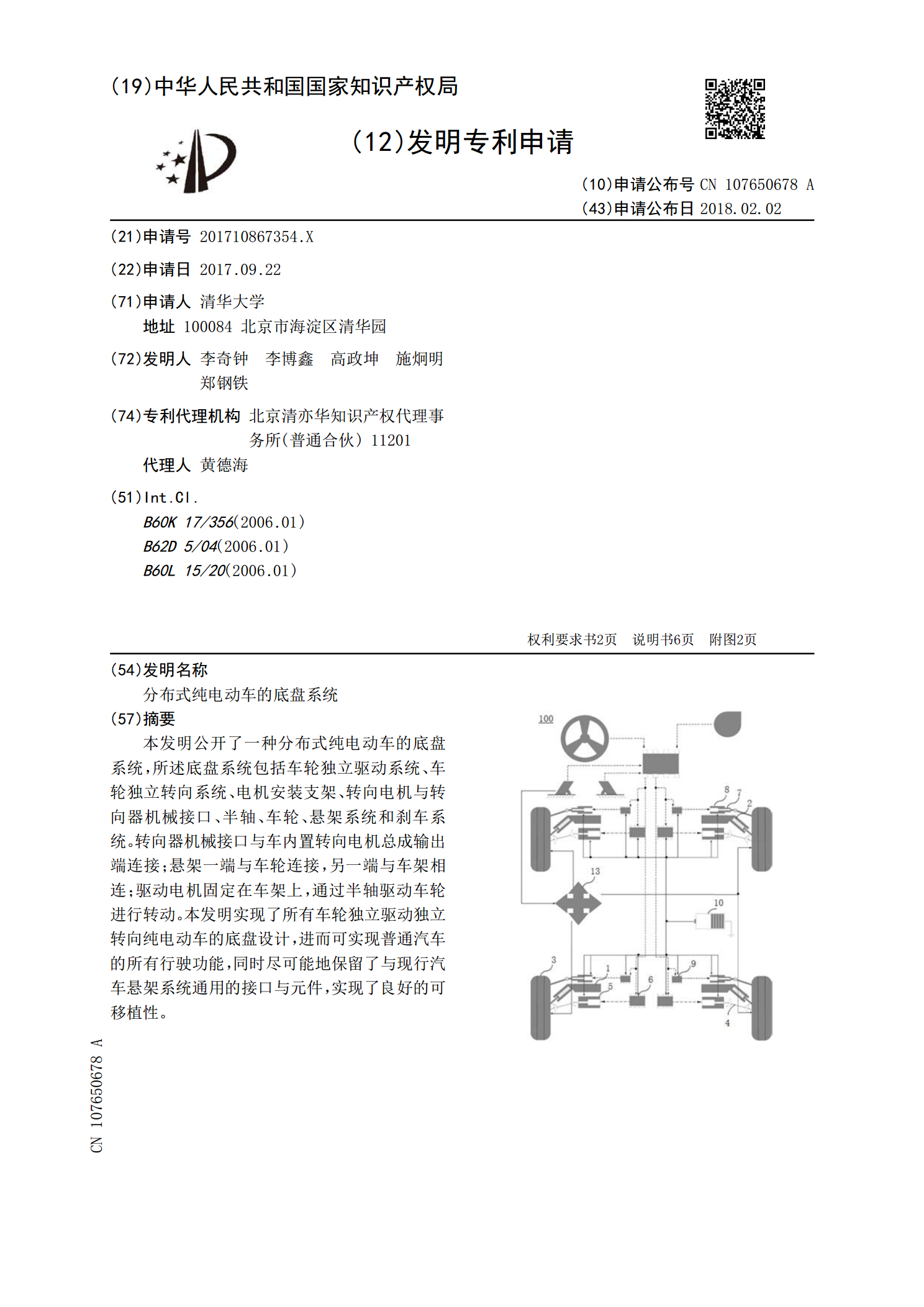
本发明公开了一种分布式纯电动车的底盘系统,所述底盘系统包括车轮独立驱动系统、车轮独立转向系统、电机安装支架、转向电机与转向器机械接口、半轴、车轮、悬架系统和刹车系统。转向器机械接口与车内置转向电机总成输出端连接;悬架一端与车轮连接,另一端与车架相连;驱动电机固定在车架上,通过半轴驱动车轮进行转动。本发明实现了所有车轮独立驱动独立转向纯电动车的底盘设计,进而可实现普通汽车的所有行驶功能,同时尽可能地保留了与现行汽车悬架系统通用的接口与元件,实现了良好的可移植性。

纯电动城市客车底盘车架的模态分析与优化.docx
纯电动城市客车底盘车架的模态分析与优化随着环保意识的不断提升,纯电动城市客车成为了未来公共交通的主要发展方向。底盘车架对电动客车的性能和安全具有举足轻重的作用,因此对其进行模态分析与优化是十分必要的。本文将首先介绍纯电动城市客车的底盘车架结构,随后进行模态分析并提出优化建议。一、底盘车架结构纯电动城市客车底盘车架主要由前、中、后三部分组成,前悬和后悬悬挂器分别安装在前后两个支撑横梁上,中间为主梁结构,并通过螺栓连接前后两个支撑横梁。主梁结构由上下两个梁和一定数量的立柱组成,通过焊接和螺栓连接方式固定在一起

纯电动车差速器齿轮修形优化方法.pdf
本发明公开一种纯电动车差速器齿轮修形优化方法,包括如下步骤:(10)差速器齿轮三维模型建立:根据直齿圆锥齿轮参数,建立半轴齿轮和行星齿轮三维模型;(20)单行星齿轮齿廓修形:根据齿廓修形优化区间,进行三维模型仿真;(30)单行星齿轮齿向修形:根据行星齿轮齿向修形优化区间,进行三维模型仿真;(40)全差速器齿轮齿廓修形:将单行星齿轮齿廓修形最优值作为全差速器齿轮齿廓修形总优化值进行仿真,得到全差速器齿轮齿廓修形最优解;(50)全差速器齿轮齿向修形:将单行星齿轮齿向修形最优值作为全差速器齿轮齿向修形总优化值进

电动车底盘.pdf
本发明涉及一种电动车配件,特别是一种电动车底盘,包括底盘架体、前车轮和后车轮,前车轮和后车轮分别安装在底盘架体的前、后两侧,所述后车轮包括左、右后车轮,所述左、右后车轮之间用横轴连接,所述横轴与固定在动力后桥上的电机相连接,所述横轴与动力后桥形成弹性支撑。采用上述结构后,横轴与动力后桥形成弹性支撑,对动力后桥起到了很好的缓震效果。