
异步电机矢量控制.docx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
矢量控制异步电机.pdf
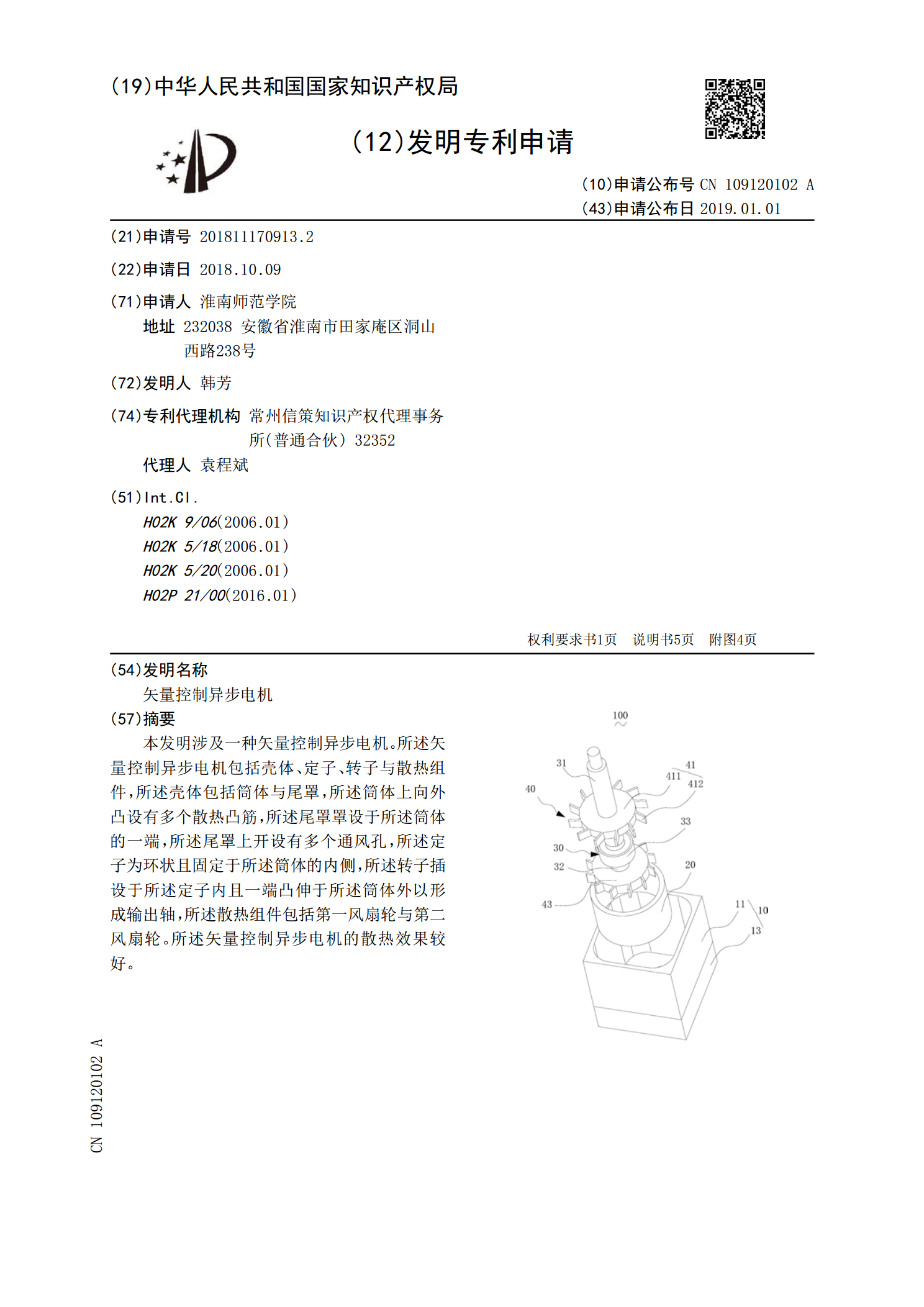
本发明涉及一种矢量控制异步电机。所述矢量控制异步电机包括壳体、定子、转子与散热组件,所述壳体包括筒体与尾罩,所述筒体上向外凸设有多个散热凸筋,所述尾罩罩设于所述筒体的一端,所述尾罩上开设有多个通风孔,所述定子为环状且固定于所述筒体的内侧,所述转子插设于所述定子内且一端凸伸于所述筒体外以形成输出轴,所述散热组件包括第一风扇轮与第二风扇轮。所述矢量控制异步电机的散热效果较好。

异步电机矢量控制.docx
基于Matlab/Simulink异步电机矢量控制系统仿真XXX(江南大学物联网工程学院无锡·中国214122)摘要:在分析了交流异步电动机数学模型和矢量控制理论的基础上,利用Matlab仿真软件对异步电机转差频率间接矢量控制系统进行了建模和仿真研究.给出了整个系统的仿真模型和仿真波形图,通过仿真结果。验证了所采用的矢量控制方法和仿真方法是正确和有效的.关键词:交流异步电动机;转差频率;矢量控制;计算机仿真中图分类号:TM30文献标识码:AAbstract:Basedonthemathematicalmo

异步电机矢量控制.docx
基于Matlab/Simulink异步电机矢量控制系统仿真XXX(江南大学物联网工程学院无锡·中国214122)摘要:在分析了交流异步电动机数学模型和矢量控制理论的基础上,利用Matlab仿真软件对异步电机转差频率间接矢量控制系统进行了建模和仿真研究.给出了整个系统的仿真模型和仿真波形图,通过仿真结果。验证了所采用的矢量控制方法和仿真方法是正确和有效的.关键词:交流异步电动机;转差频率;矢量控制;计算机仿真中图分类号:TM30文献标识码:AAbstract:Basedonthemathematicalmo
异步电机矢量控制 (2).ppt
异步电机矢量控制原理.pdf
异步电机矢量控制原理一、引言异步电机是一种广泛应用的电动机,其控制方式主要有直接转矩控制和矢量控制两种。其中,矢量控制是一种更加精确、灵活的控制方式,可以实现高效率、高性能的运行。本文将详细介绍异步电机矢量控制原理。二、异步电机基础知识1.异步电机结构和工作原理异步电机由定子和转子两部分组成,定子上有三个相位交流绕组,转子上则有导体条。当三相电源施加在定子上时,会产生旋转磁场,进而感应出转子中的感应电动势,并使得导体条在旋转磁场中感受到一个旋转力矩,从而带动转子运动。2.异步电机参数异步电机的参数包括定子