
机器人滚边压合技术应用.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人滚边压合技术应用.docx
机器人滚边压合技术应用作者:撰文/长春大正博凯汽车设备有限公司刘殿福机器人滚边压合技术,现在已经被应用于轿车白车身关键部件的包边制造中,主要部件有顶盖天窗、发动机罩盖、行李厢盖、车门、翼子板和轮罩。随着汽车工业的迅猛发展,车型的更新换代加速,各大汽车制造厂家为了缩短产品的开发周期、降低开发成本,广泛采用柔性化生产技术。这样,机器人滚边压合的这项柔性化生产技术成为轿车产品开发首选应用技术。机器人滚边压合技术的柔性化主要体现在两方面:一方面该技术可以根据实际生产节拍需要,采用一机多模或一模多机的工艺方案生产加

机器人滚边压合技术应用.doc
机器人滚边压合技术应用作者:撰文/长春大正博凯汽车设备有限公司刘殿福机器人滚边压合技术,现在已经被应用于轿车白车身关键部件的包边制造中,主要部件有顶盖天窗、发动机罩盖、行李厢盖、车门、翼子板和轮罩。随着汽车工业的迅猛发展,车型的更新换代加速,各大汽车制造厂家为了缩短产品的开发周期、降低开发成本,广泛采用柔性化生产技术。这样,机器人滚边压合的这项柔性化生产技术成为轿车产品开发首选应用技术。机器人滚边压合技术的柔性化主要体现在两方面:一方面该技术可以根据实际生产节拍需要,采用一机多模或一模多机的工艺方案生产加

机器人滚边压合工艺.docx
机器人滚边压合工艺机器人滚边压合工艺一、引言机器人技术的迅速发展为工业生产带来了许多创新和改进,其中之一便是机器人滚边压合工艺技术。滚边压合是一种利用机器人的力学手臂来在两个工件相遇的边缘进行连续滚压,以实现牢固连接的工艺方法。在制造领域,机器人滚边压合工艺被广泛应用于汽车、电子、航空航天等领域,极大地提高了产品质量、生产效率和安全性。本论文将介绍机器人滚边压合工艺的原理、应用和发展趋势,以期对读者对该工艺有更全面的了解。二、原理机器人滚边压合工艺的核心原理是利用机器人的力学手臂实现对工件的滚动和压合。具
机器人智能滚边压合系统及工艺方法.pdf
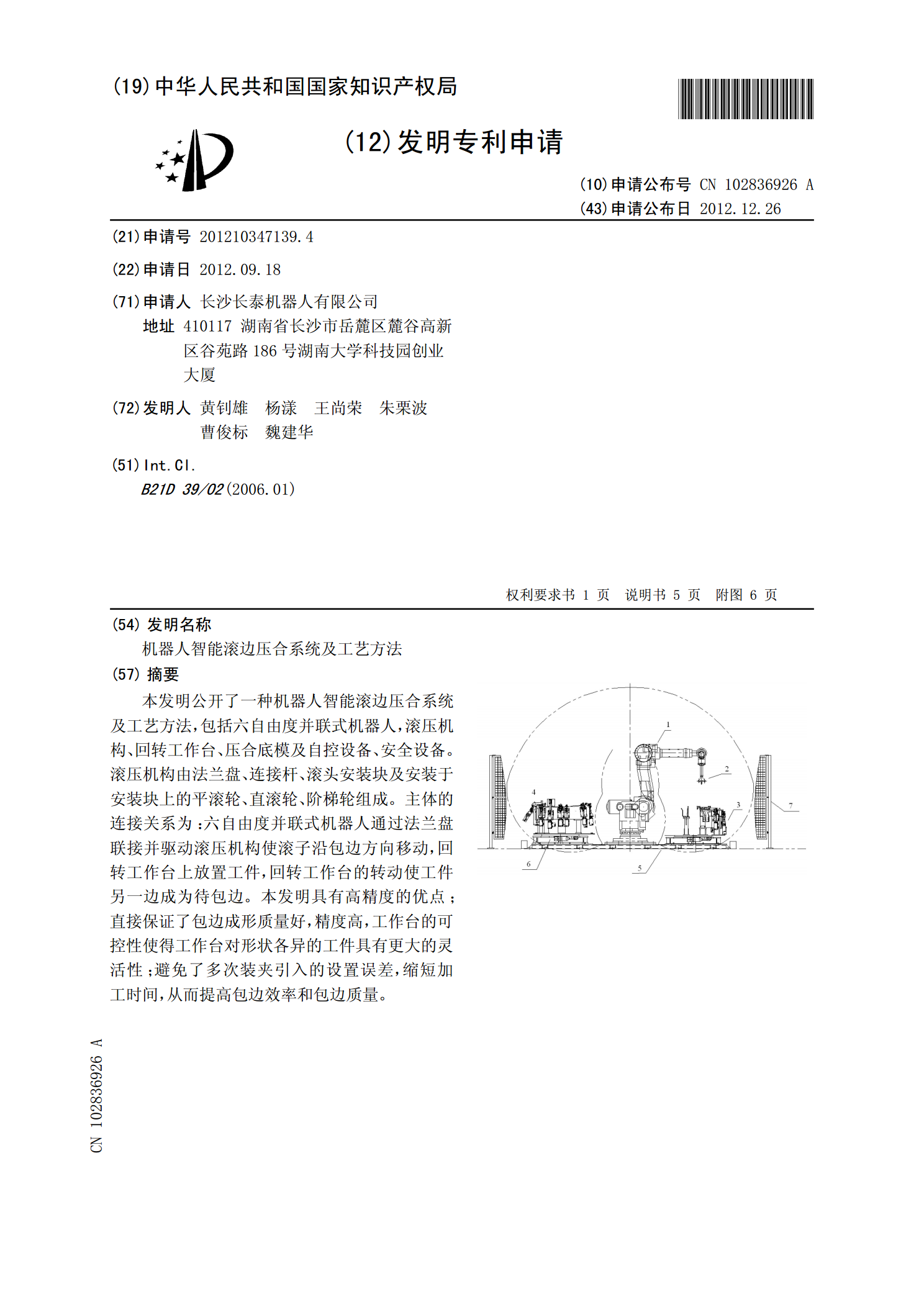
本发明公开了一种机器人智能滚边压合系统及工艺方法,包括六自由度并联式机器人,滚压机构、回转工作台、压合底模及自控设备、安全设备。滚压机构由法兰盘、连接杆、滚头安装块及安装于安装块上的平滚轮、直滚轮、阶梯轮组成。主体的连接关系为:六自由度并联式机器人通过法兰盘联接并驱动滚压机构使滚子沿包边方向移动,回转工作台上放置工件,回转工作台的转动使工件另一边成为待包边。本发明具有高精度的优点;直接保证了包边成形质量好,精度高,工作台的可控性使得工作台对形状各异的工件具有更大的灵活性;避免了多次装夹引入的设置误差,缩短

汽车滚边技术与应用.docx
汽车滚边技术与应用汽车滚边技术与应用摘要:随着汽车行业的快速发展,汽车滚边技术成为了一项重要技术。汽车滚边技术是一种利用特殊工艺对汽车车身进行边缘处理的技术。它可以提高汽车外观质量,减少车身接缝处的风噪和抛光等问题,同时也能够增加车身的安全性能。本文将围绕汽车滚边技术的原理、应用以及存在的问题等方面展开讨论。第一部分:引言汽车滚边技术是一项对汽车车身进行边缘处理的技术。传统的汽车车身都是由多部件通过焊接、拼接等方式组装而成,这样容易导致车身接缝处有凸起的缝隙。这些接缝处在高速行驶中容易产生风噪,同时也给车