
地铁基坑维护墙桩顶水平位移监测方法的比较.docx

快乐****蜜蜂


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

地铁基坑维护墙桩顶水平位移监测方法的比较.docx
地铁基坑维护墙(桩)顶水平位移监测方法的比较测绘工程部段绪稳摘要:介绍了地铁基坑维护墙(桩)顶水平位移监测的常用方法及其优缺点,通过比较各种方法在地铁基坑监测中的适用性,来探讨地铁基坑特定环境下适合的监测方法。关键词:地铁基坑监测水平位移方法1、前言在城市地铁车站建设施工中,为确保车站基坑的开挖及周边建、构筑物的安全,必须进行安全监测。基坑维护墙(桩)顶水平位移(以下简称“水平位移”)监测就是其中非常重要的一个项目。在地铁基坑特定的环境下,选择何种监测方法才能方便、快捷的获取监测数据,是水平位移监测要解决

地铁深基坑墙顶水平位移监测方法.docx
地铁深基坑墙顶水平位移监测方法Title:MonitoringMethodsforHorizontalDisplacementofSubwayDeepExcavationWallTopAbstract:Theconstructionofsubwaydeepexcavationsofteninvolvessignificantchallenges,suchasgroundmovement,whichcanposeriskstoadjacentstructures.Therefore,themonitorin

浅谈基坑围护桩顶水平位移监测方法.docx
浅谈基坑围护桩顶水平位移监测方法浅谈基坑围护桩顶水平位移监测方法摘要:本文介绍了深基坑水平位移监测中常用方法,并重点介绍了全站仪极坐标法水平位移监测和计算位移量的方法。关键词:水平位移极坐标法基准线法前方交会法中误差一、引言随着城市的快速发展,各种深基坑工程越来越多,受地质、地下水、周边环境及其它不确定因素的影响,给施工带来的难度及风险也越来越大。为了最大限度的规避风险,避免人员伤亡和和事故发生,为工程建设提供安全保障服务,基坑监测已成为施工过程中非常重要的一个环节,受到了建设主管部门、建设单位、设计、监
一种基坑支护桩桩顶水平位移监测方法.pdf
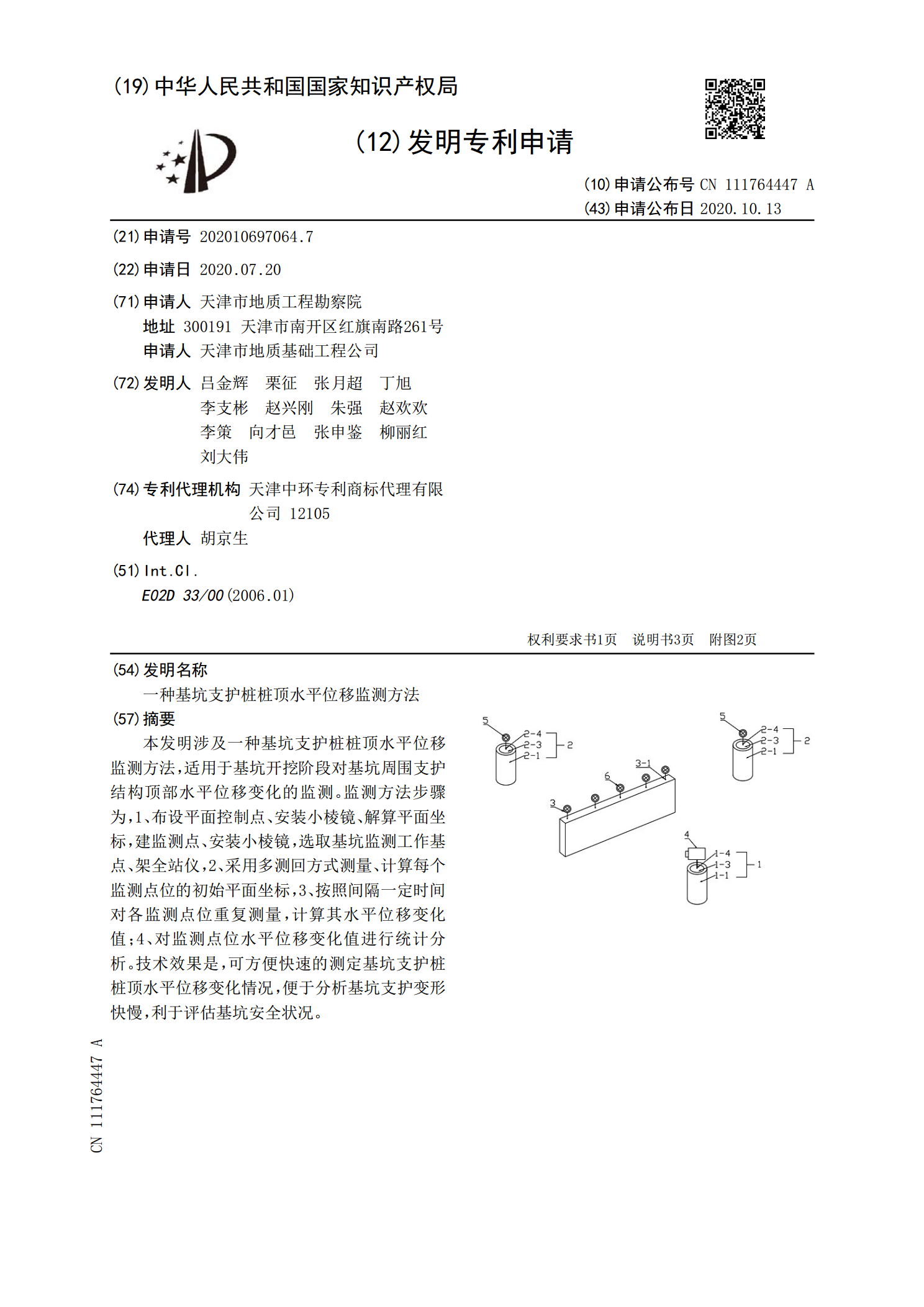
本发明涉及一种基坑支护桩桩顶水平位移监测方法,适用于基坑开挖阶段对基坑周围支护结构顶部水平位移变化的监测。监测方法步骤为,1、布设平面控制点、安装小棱镜、解算平面坐标,建监测点、安装小棱镜,选取基坑监测工作基点、架全站仪,2、采用多测回方式测量、计算每个监测点位的初始平面坐标,3、按照间隔一定时间对各监测点位重复测量,计算其水平位移变化值;4、对监测点位水平位移变化值进行统计分析。技术效果是,可方便快速的测定基坑支护桩桩顶水平位移变化情况,便于分析基坑支护变形快慢,利于评估基坑安全状况。

一种基坑支护桩桩顶水平位移监测装置及监测方法.pdf
本发明公开了一种基坑支护桩桩顶水平位移监测装置,其包括稳固支座、支撑板架、分隔板、位移监测装置以及辅助矫正组件,所述稳固支座纵向固定在稳定基面上,且设在支护桩左、右两侧,所述支撑板架横向连接固定在左、右侧稳固支座上,所述分隔板上端垂向规定在支撑板架下侧板面上,呈横向线性排列设置多组,相邻所述分隔板与支撑板架形成位移监测室;所述分隔板下端垂向连接在双向伸缩机的中上端面,一组所述位移监测室中的双向伸缩机之间安装有位移监测装置,所述位移监测装置中设置有定位预警组件,对支护桩的形变位移进行监测、预警,所述支护桩桩