
题智能救援车53325.docx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

题智能救援车53325.docx
2008年G题智能救援车以直流减速电机为驱动系统自制小车,以凌阳16位单片机SPCE061为控制核心,通过光电开关传感器、黑白线传感器、接近开关传感器、电磁铁进行距离探测、黑白线循迹、金属探测与拾取,实现了智能救援车滨州学院王海明常帅张令苹专家点评:本智能救援小车以直流减速电机为驱动系统,以16位单片机SPCE061为控制核心,通过光电开关传感器、黑白线传感器、接近开关传感器、电磁铁进行距离探测、黑白线循迹、金属探测与拾取,实现了自动前进与避障。通过测试达到了设计要求。石油大学(华东)信息与控制学院刘润华
一种4G智能灭火救援系统及4G智能灭火救援车.pdf
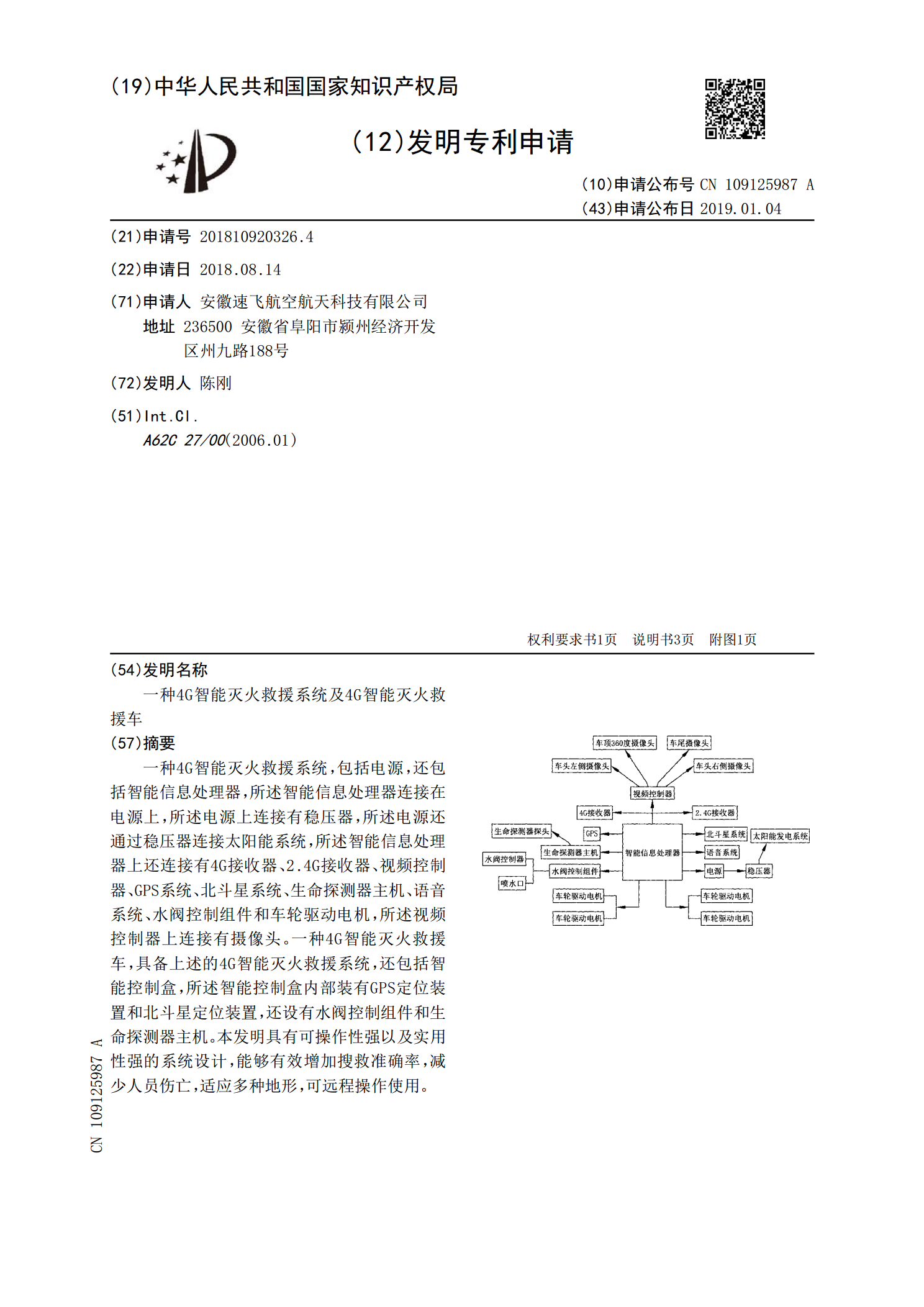
一种4G智能灭火救援系统,包括电源,还包括智能信息处理器,所述智能信息处理器连接在电源上,所述电源上连接有稳压器,所述电源还通过稳压器连接太阳能系统,所述智能信息处理器上还连接有4G接收器、2.4G接收器、视频控制器、GPS系统、北斗星系统、生命探测器主机、语音系统、水阀控制组件和车轮驱动电机,所述视频控制器上连接有摄像头。一种4G智能灭火救援车,具备上述的4G智能灭火救援系统,还包括智能控制盒,所述智能控制盒内部装有GPS定位装置和北斗星定位装置,还设有水阀控制组件和生命探测器主机。本发明具有可操作性强

一种特种移动救援智能服务车.pdf
一种特种移动救援智能服务车,包括汽车本体,在汽车本体的后车厢内设有一车厢内板架,在车厢内板架内设有一通过驱动机构驱动的可收缩至车厢内板架内或伸至车厢内板架外的举升机构,在汽车本体的后车厢底部设有一牵引机构,在汽车本体的后车厢内放置有可与牵引机构相连的牵引架以及可与牵引架相连的若干个辅助拖轮,驱动机构、举升机构、牵引机构分别与控制装置相连。它结构设计合理,完善了上门服务车辆的功能,不仅可以对车辆进行举升,从而对车辆进行各种维修、保养等操作,而且可对事故车辆进行托运,事故车辆上无需人员操作,稳定可靠,安全性高
一种社区智能灭火救援无人巡逻车.pdf
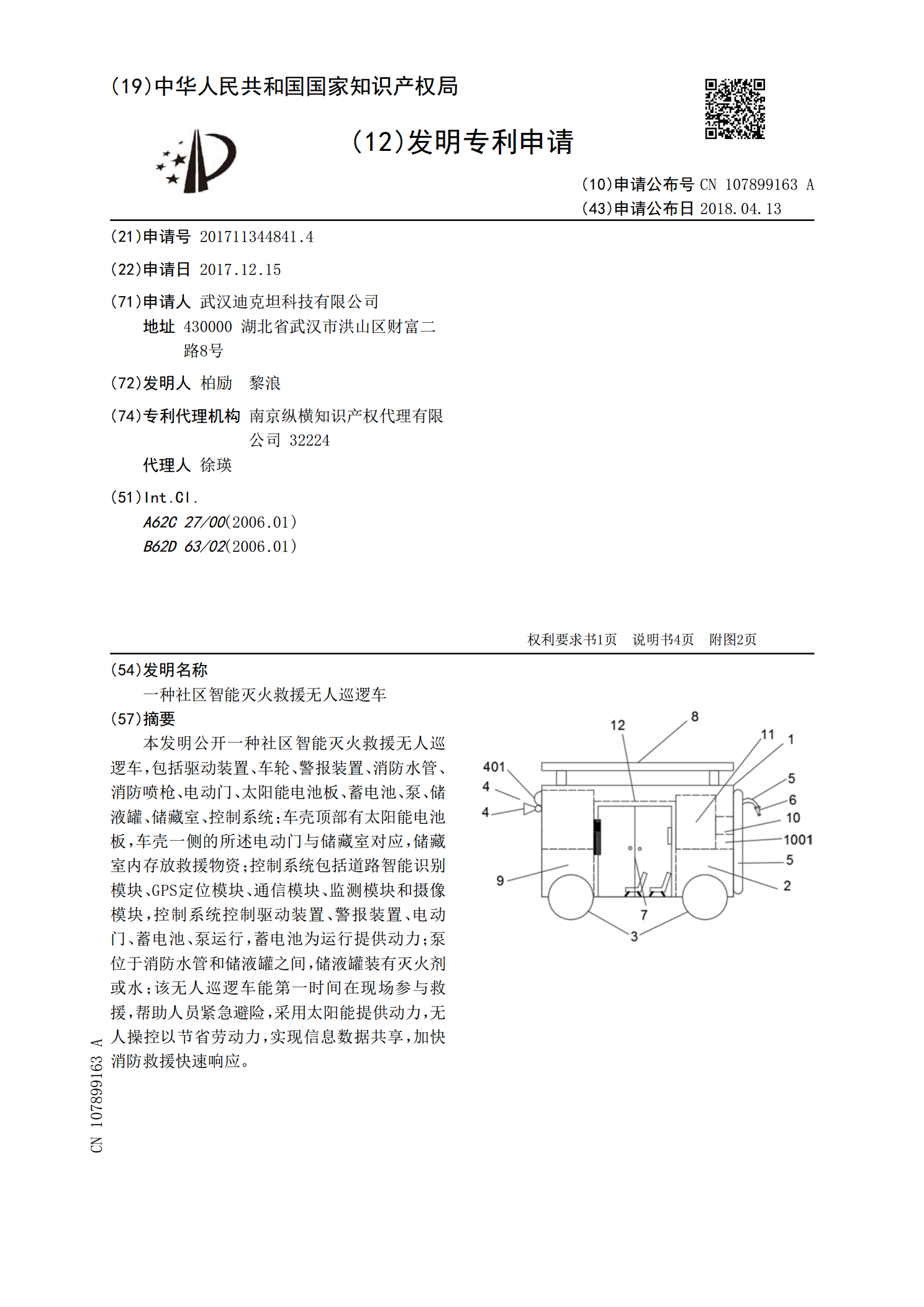
本发明公开一种社区智能灭火救援无人巡逻车,包括驱动装置、车轮、警报装置、消防水管、消防喷枪、电动门、太阳能电池板、蓄电池、泵、储液罐、储藏室、控制系统;车壳顶部有太阳能电池板,车壳一侧的所述电动门与储藏室对应,储藏室内存放救援物资;控制系统包括道路智能识别模块、GPS定位模块、通信模块、监测模块和摄像模块,控制系统控制驱动装置、警报装置、电动门、蓄电池、泵运行,蓄电池为运行提供动力;泵位于消防水管和储液罐之间,储液罐装有灭火剂或水;该无人巡逻车能第一时间在现场参与救援,帮助人员紧急避险,采用太阳能提供动力

现代企业管理53325.pptx
会计学本章主要内容1、什么是企业战略?P452、企业环境(经营环境)的结构和特点3、经营环境分析4、企业分析5、综合分析:明确战略目标6、企业有哪些战略可供选择?7、企业如何实施和控制战略?8、科学决策9、经营计划目标管理10、市场营销含义11、市场分析12、市场营销管理过程13、市场营销策略080591(2)定价策略1)成本导向定价法2)需求导向定价法3)竞争导向定价法4)以上为基础定价法(3)分销策略1)销售渠道概念:产品由生产者转移到消费者过程中所经历的各个环节。2)销售渠道设计:影响因素(产品、市