
深基坑变形实时监控系统设计与应用.docx

快乐****蜜蜂


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

深基坑变形实时监控系统设计与应用.docx
深基坑变形实时监控系统设计与应用【摘要】上海衡山路12#地块的基坑工程紧邻运行中的地铁车站结构,施工对变形控制要求极高。由此,通过应用基坑变形实时监控系统新技术,解决了紧邻地铁车站结构的深基坑施工要求的苛刻变形控制难题,该技术先进可靠并经济安全,具有推广和使用价值。【关键词】深基坑工程地铁结构基坑变形控制实时监控系统1工程概况衡山路12#地块宾馆项目位于上海市徐汇区衡山路12号,属于上海市衡山路—复兴路风貌保护区核心地段。本项目建筑总高度为23.95m,地上5层,地下3层;总建筑面积为53193m2,地上

实时性能监控系统的应用.docx
实时性能监控系统的应用实时性能监控系统的应用摘要:随着科技的迅猛发展,计算机系统的性能监控已成为重要的研究领域之一。实时性能监控系统通过收集、分析和展示系统的各项指标,可以帮助管理人员及时发现和解决系统性能问题,以提高系统的稳定性和可靠性。本论文将介绍实时性能监控系统的基本原理和结构,探讨其在服务器、网络和数据库等方面的应用,并分析其在安全管理和优化调优方面的作用。1.引言在大数据和云计算时代,计算机系统的性能监控显得尤为重要。实时性能监控系统作为一种有效的工具,可以实时监测系统的各项指标,并提供实时的、

深基坑设计参数反演分析与变形预测系统应用.pptx
,目录PartOnePartTwo反演分析方法反演分析流程反演分析结果反演分析应用PartThree变形预测方法预测模型建立预测结果评估预测系统应用PartFour结合方式与原理结合效果分析结合应用实例结合的优势与局限性PartFive设计参数优化方法变形控制策略实践案例分析实践效果评估与改进建议PartSix技术发展趋势应用前景展望对行业的推动作用需要进一步解决的问题与挑战THANKS

地理野外实习远程实时监控系统的设计与应用.docx
地理野外实习远程实时监控系统的设计与应用地理野外实习过程中,学生们在野外进行各种采样、观测、调查等活动,以了解自然环境及人类活动对地理环境的影响,并收集相关的数据和样品。然而,在野外实习过程中,往往会遇到一些意外情况,如迷路、遇险或者采样设备故障等问题。这就需要一种实时监控系统的设计与应用。一、系统设计1、系统架构远程实时监控系统由监控中心、GPS信号发射器、GPRS模块、嵌入式终端设备、电源管理器和野外设备组成。监控中心负责接收和处理传来的数据,GPS信号发射器负责向监控中心发送定位信息,GPRS模块作
一种三维动态深基坑微变形远程实时监控系统及方法.pdf
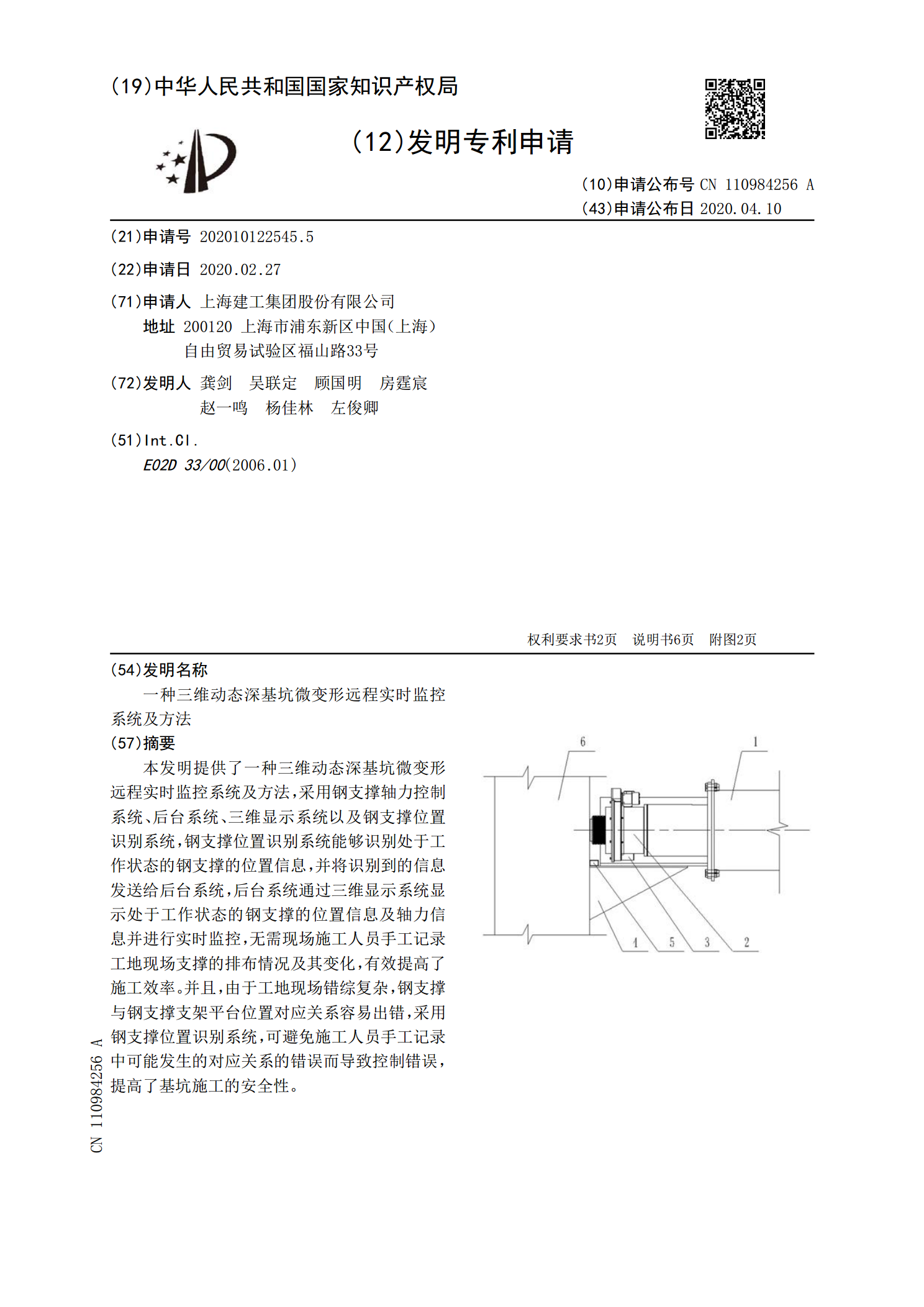
本发明提供了一种三维动态深基坑微变形远程实时监控系统及方法,采用钢支撑轴力控制系统、后台系统、三维显示系统以及钢支撑位置识别系统,钢支撑位置识别系统能够识别处于工作状态的钢支撑的位置信息,并将识别到的信息发送给后台系统,后台系统通过三维显示系统显示处于工作状态的钢支撑的位置信息及轴力信息并进行实时监控,无需现场施工人员手工记录工地现场支撑的排布情况及其变化,有效提高了施工效率。并且,由于工地现场错综复杂,钢支撑与钢支撑支架平台位置对应关系容易出错,采用钢支撑位置识别系统,可避免施工人员手工记录中可能发生的